
Flying AI Autonomous Drones in Industrial Operations
Visualization: © Ulrich Buckenlei | Concept illustration of autonomous drones in an industrial environment | No claim of technical accuracy
Autonomous flying drones are quietly reshaping industrial operations. They take over tasks that are risky, inefficient, or not sustainable for humans over time, such as work on critical infrastructure, at extreme heights, in harsh weather, or in hard to access environments. What is emerging is not a future scenario, but a new operational reality.[1][2]
The visualization intentionally compresses this shift into a conceptual image. It does not show a specific product, but an idea: flying AI as an active actor inside industrial systems. The focus is not on technical detail, but on the interplay of autonomy, physical work, and safe distance from humans. The drone appears here not as a tool, but as part of a distributed intelligent system.[1]
This is where a structural shift begins. Industrial work is no longer organized exclusively around the human body, but around safety, scalability, and system intelligence. Autonomous drones mark the transition from occasional missions to continuous machine led operations in demanding environments.[1][2]
What Flying AI Makes Industrially Possible for the First Time
Industrial robotics has been established for many years. Stationary systems and automated machines perform precise tasks in controlled environments. Flying AI with autonomous drones adds a new capability to this landscape: flexible reach of work locations that ground based systems can access only with limitations or significant effort.[1][3]
By combining flight capability, mechanical functions, and AI driven control, new systems emerge that do not only inspect, but can also perform work directly on industrial infrastructure. Drones can stabilize on cables, move along existing networks, and execute tasks that previously required manual crews, specialized vehicles, or temporary shutdowns. This opens new operational options, especially for large scale or exposed assets.[3][4]

Autonomous drone at work: flying AI enables operations on hard to reach infrastructure
Visualization: © Ulrich Buckenlei | Concept illustration of autonomous drones in an industrial environment | No claim of technical accuracy
Industrial value does not come from a single feature. It emerges from the combination of mobility, physical work capability, energy supply, and control. Flying AI does not replace existing procedures entirely, but extends them with new spatial and operational options.[1][3]
- Extended reach → work at exposed or difficult to access locations
- Direct execution → physical tasks instead of data capture only
- Process integration → connection to existing industrial workflows
This interplay forms the technical basis for flying AI in industrial environments. The next chapter focuses on how these systems physically work, absorb forces, and create stability while moving along existing infrastructure.
When Flying Systems Perform Physical Work
Flight alone does not make a drone an industrial work device. The decisive difference is the ability to physically interact with the environment. In industrial contexts this means absorbing forces, establishing stability, and executing controlled movements along existing structures. Only then does a flying system become a work capable platform.[1][3]
Autonomous drones designed for industrial use stabilize intentionally on cables, beams, or structural elements. These contact points are used not only for positioning, but also for controlled motion and precise task execution. The work does not happen in free flight, but through controlled contact with the asset. Mechanics, sensing, and control act together to enable safe and repeatable operations.[3][5]

Drone in contact operation: stabilization and controlled movement along a cable
Visualization: © Ulrich Buckenlei | Concept illustration of autonomous drone systems | No claim of technical accuracy
This mode of work differs fundamentally from classic inspection drones. Instead of only collecting data, the systems act on the infrastructure itself. Movements follow defined paths, forces are measured continuously, and adjustments are made in real time. This supports repeatability without requiring every maneuver to be planned or supervised manually.[3][5]
- Stabilization → physical contact replaces free hovering
- Force absorption → mechanical loads are managed in a controlled manner
- Guided motion → tasks are executed along existing structures
Chapter two shows why flying AI should not be understood as a simple extension of conventional drones, but as a distinct work mode inside industrial processes. The next chapter turns to energy, endurance, and reliability as the foundation for continuous operation.
From a Single Flight to Systemic Autonomy
At this point the focus shifts from the single drone to the larger system it operates in. Flying AI in industrial operations does not function as an isolated device, but as part of a continuously managed technical fabric. The key is not the individual mission, but the ability to recognize states, derive decisions, and adapt behavior accordingly.[1][2]
Autonomy here is not absolute independence. It is controlled self steering. The drone continuously evaluates parameters such as energy state, position, mission context, and environmental conditions. Decisions are not pre scripted in full detail, but made within clearly defined system boundaries. The mental model shifts from tool to operational unit.[1][2]
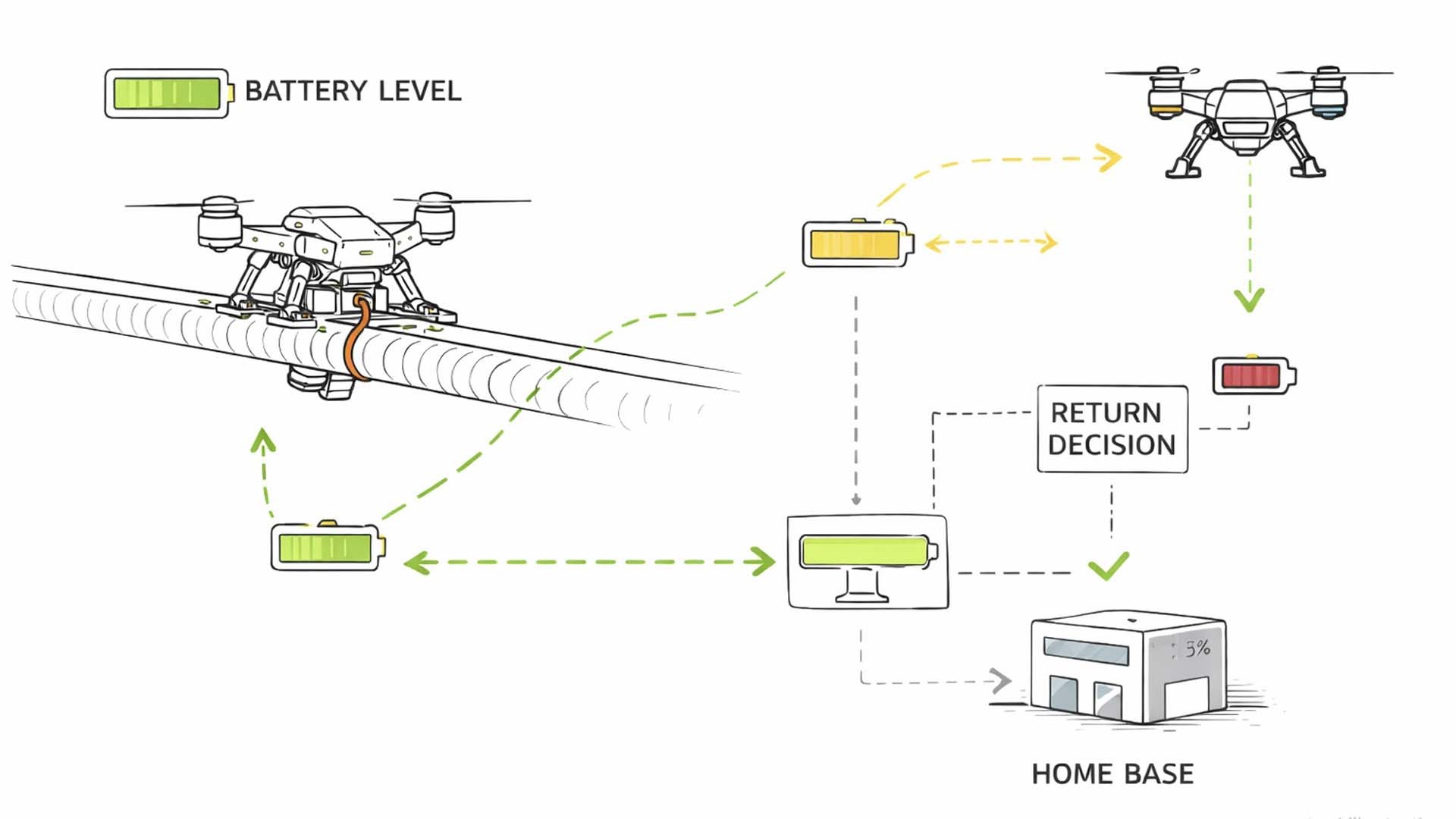
Conceptual autonomy logic: energy state, mission decisions, and feedback loops as part of a running system
Visualization: © Ulrich Buckenlei | Concept illustration of autonomous drones in an industrial environment | No claim of technical accuracy
Energy management makes this system character particularly visible. The question is not whether a drone can fly, but how long, how far, and under which conditions. Battery state, return decisions, and safe waiting positions become part of continuous evaluation. Work is not interrupted, but modulated. In research, approaches such as infrastructure adjacent recharging and long duration operation highlight this direction toward sustained autonomy.[6][7]
- Systemic autonomy → decisions emerge from state evaluation, not single commands
- Energy as a control variable → battery state shapes mission, behavior, and return
- Controlled self steering → autonomy within clearly defined boundaries
Chapter three makes clear that flying AI convinces not through spectacular one off actions, but through reliable system logic. The next chapter focuses on how autonomy remains connected to human control, and why human in the loop remains central for industrial use.
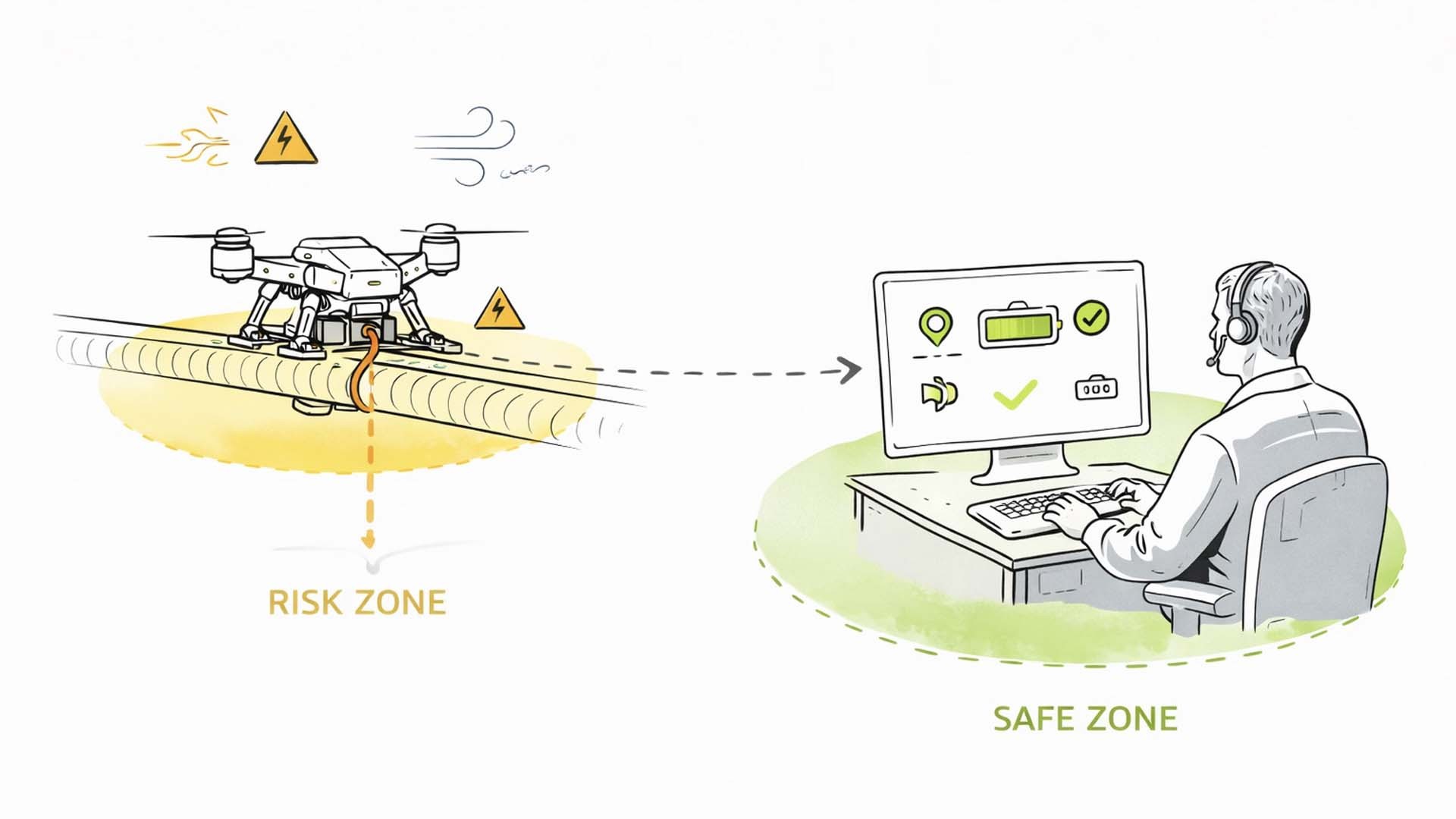
Human in the Loop Control Stays with People
As autonomy increases, the focus shifts from execution to oversight. Autonomous flying drones act independently in physical space, but their decisions do not exist in isolation. They are embedded in monitoring, authorization, and escalation structures that keep human responsibility intact.[8][9]
Operational intelligence is not located only in the drone, but in the interplay of sensing, mission logic, and external control. People define boundaries, monitor system states, and intervene when conditions require it. Autonomy here does not mean loss of control, but a deliberate shift from physical presence to strategic supervision.[8][9]
Human in the loop oversight: autonomous systems act independently while remaining continuously monitorable and controllable
Visualization: © Ulrich Buckenlei | Concept illustration | No claim of technical accuracy
This structure is critical for industrial use. Autonomous systems take on hazardous and hard to access tasks without outsourcing responsibility. Humans stay in the decision chain, not as operators of individual motions, but as the instance for assessment, approval, and intervention.
In critical infrastructure this becomes especially important. Safety emerges not from maximum autonomy, but from clearly defined control points, transparent system states, and the ability for human intervention, aligned with structured operational risk assessment approaches used in civil drone operations.[8][9]
- Oversight instead of constant presence → control from a safe distance
- Escalation logic → human intervention for edge cases and deviations
- Responsibility remains intact → autonomy does not replace supervision
This shows that modern industrial AI does not aim for total independence. The goal is a robust interplay of machine execution and human control. This balance sets the stage for the next step: how such systems can be designed to be safe, scalable, and responsible over time.
Safety as a Design Principle Not an Afterthought
The focus now shifts from physical separation to the role of AI itself. Safety is no longer achieved mainly through isolation or rigid rules, but through continuous evaluation. AI analyzes system states, detects deviations, and estimates risk in real time, often before issues become visible or tangible to people.[1][10]
AI is not an independent actor in the sense of uncontrolled agency. It acts as a mediating layer between physical reality and human oversight. Sensor data, state variables, and context information converge to support decisions that remain auditable and reviewable. Safety is not administered, it is designed into the system architecture.[1][8][10]
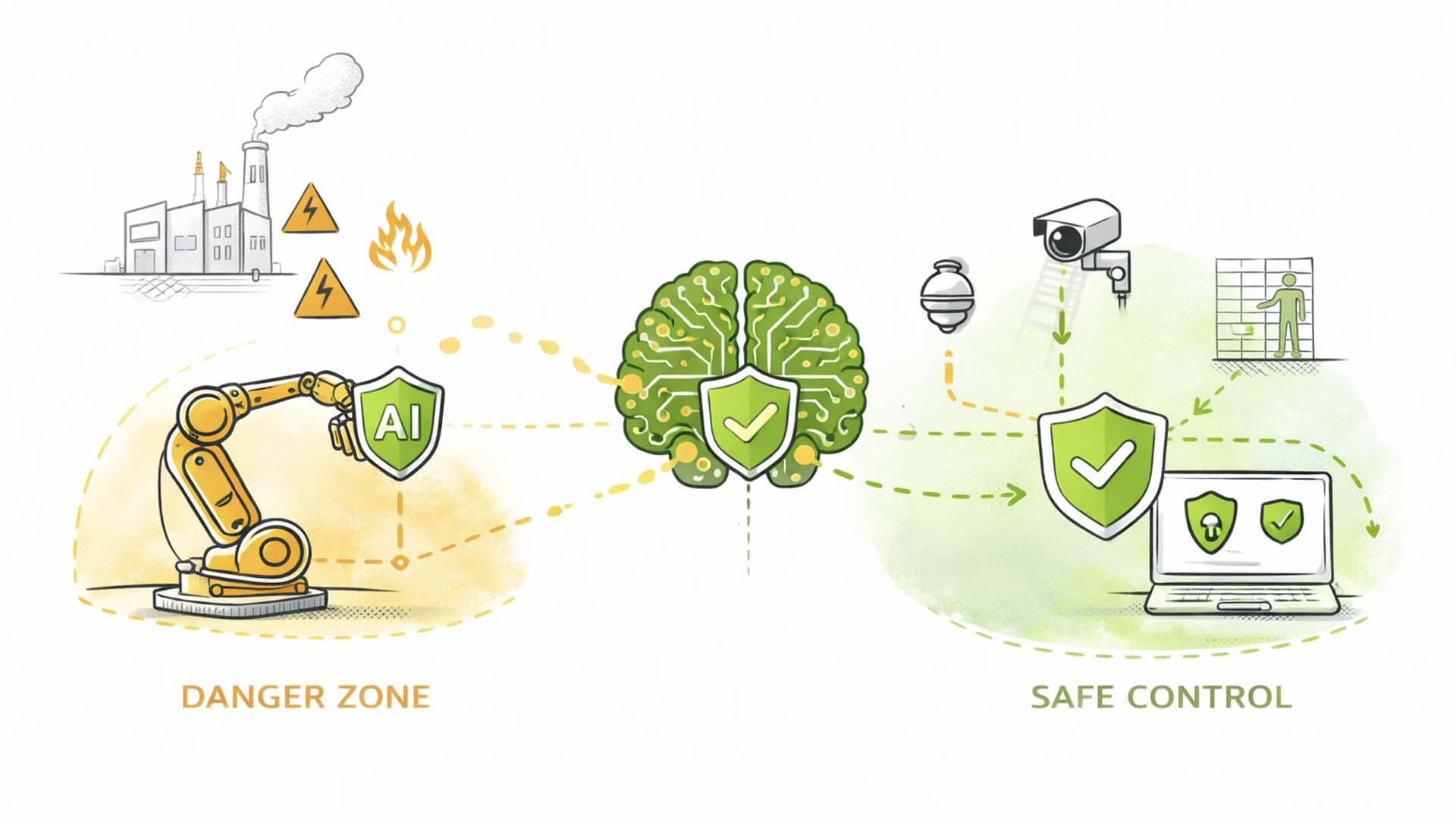
AI as a safety layer: state analysis, decision logic, and human oversight working together
Illustration: concept representation | No claim of technical verification
This logic reshapes industrial responsibility. People stay in the decision chain, but they intervene where assessment and control make sense, not where physical danger occurs. Designing safe systems therefore starts in the architecture, not at the edges of the process.[8][9]
- AI as an evaluation layer → safety emerges through continuous analysis
- Human oversight → decisions remain reviewable and auditable
- Design instead of reaction → safety is built into the system
This chapter marks the transition from spatial separation to intelligent control. The next section focuses on how these systems integrate into industrial operations and the role of autonomous processes and infrastructure.
Autonomy Emerges from Systems Working Together
The focus now shifts from the individual machine to the whole system. Autonomous drones do not create impact in isolation, but as part of distributed infrastructure. Sensing, navigation, energy management, and decision logic work together to enable continuous operation in complex industrial environments.[1][2]
The systems shown illustrate that autonomy does not mean acting without oversight. Robust processes arise through clearly defined transitions between automated execution, state monitoring, and human control. The drone acts independently within defined parameters while remaining embedded in a higher level system.[8][9]
- Distributed intelligence → autonomy emerges from multiple subsystems
- Continuous operation → energy, navigation, and task control interlock
- Clear responsibilities → automation with defined intervention points
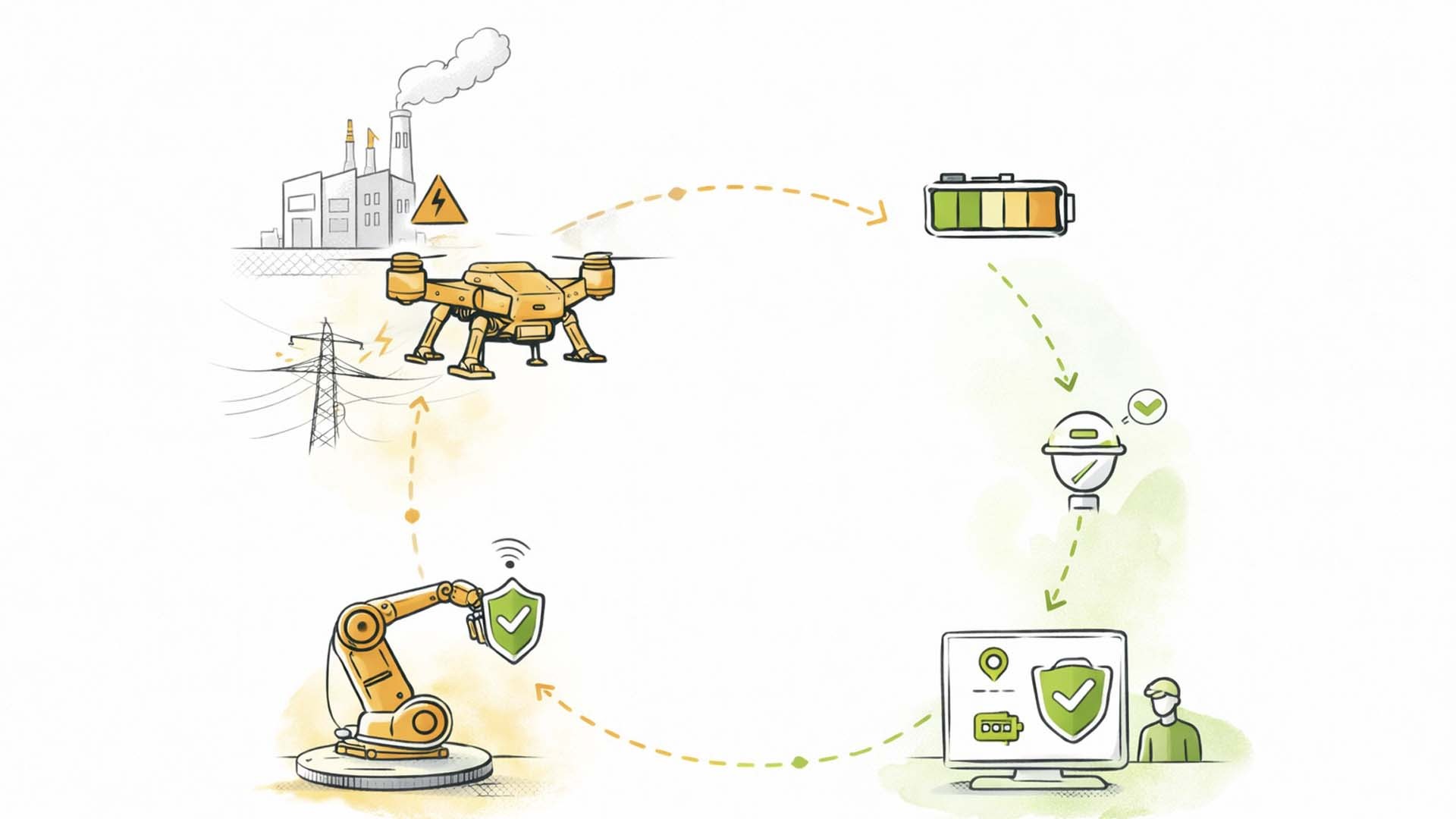
Autonomous drones as part of a distributed system: navigation, energy state, and mission logic are continuously coordinated
Illustration: © Ulrich Buckenlei | Concept illustration | No claim of technical accuracy
This systemic perspective distinguishes modern industrial AI from earlier automation approaches. The focus is not single functions, but the interplay of data, states, and decisions. Autonomy becomes a question of architecture and process design, not maximum independence.[1][2]
Video Physical AI in Industrial Operations Under Real Conditions
The following video shows autonomous drones working on critical infrastructure. The focus is not a single device, but the combination of perception, targeted interaction with the environment, and safe distance from people. Physical AI becomes real where work is weather dependent, hard to access, or risky.
The sequences make visible what remains abstract in text. These systems operate under physical constraints, react to resistance, stabilize while moving, and execute tasks that previously required significant risk. Industrial work gradually shifts from on site exposure to supervised execution.[1][3]
Video still as a conceptual illustration in the XR Stager style visualization without claim of technical accuracy
Video material from publicly accessible industry footage rights remain with the respective rights holders editorial analysis and context by Ulrich Buckenlei
Note the video is embedded for journalistic and analytical purposes and optimized for mobile playback including iOS
The footage underscores that physical AI is not a distant promise, but already deployed and tested in high risk industrial environments. The decisive factor is the new operational logic. Autonomy does not mean unbounded action, but controlled execution within clear rules, visibility, and accountability.[8][9]
- Embodied autonomy → systems respond to real forces and material behavior
- Energy autonomy → charging, pausing, and resuming become part of mission logic
- Safety by design → work moves from the hazard zone into safe oversight
Sources and Research References
- ArXiv, “AI Powered Aerial Robots for Inspection and Maintenance”, 2024. Overview of integrated aerial robotics systems for inspection and maintenance, including autonomy, operator support, and extended range concepts. [1]
- MDPI, “Aerial Robotics for Inspection and Maintenance”, book collection, 2024. Broad overview of aerial robotics in inspection and maintenance contexts, including physical interaction scenarios. [2]
- Research paper, “A Powerline Inspection UAV Equipped with Dexterous Lockable Gripping Mechanisms for Autonomous Perching and Contact Rolling”, 2024. Describes perching and contact rolling approaches for power line inspection and disturbance robustness. [3]
- ScienceDirect, “Deep Learning in Automated Power Line Inspection A Review”, 2025. Review of modern power line inspection approaches including vision and automated analysis pipelines. [4]
- MDPI Drones, “A Review of Real Time Implementable Cooperative Aerial Manipulation”, 2024. Review of aerial manipulation systems and control approaches tested in real environments. [5]
- ICRA paper, “Autonomous Overhead Powerline Recharging for Uninterrupted Drone Operations”, 2024. Demonstrates autonomous landing and recharging concepts near power lines for sustained operation. [6]
- Applied Sciences, “A Novel Charging Station on Overhead Power Lines for Drone Applications”, 2023. Proposes harvesting energy from power line magnetic fields to address endurance limitations. [7]
- EASA, “Specific Operations Risk Assessment SORA”, methodology page. Describes risk classification and mitigation logic for civil drone operations in the specific category. [8]
- ISO, “Unmanned Aircraft Systems Requirements for Safe Commercial Operations”, published 2023. Defines requirements for safe commercial UAS operations including operational procedures and safety critical services. [9]
- Cybersecurity guidance, “Unmanned Aircraft Systems Addressing Critical Infrastructure Security Challenges”, 2024. Discusses security risks and operational considerations for drones in critical infrastructure contexts. [10]
When Autonomous Systems Become Industrial Reality
The use of autonomous flying AI in industrial environments shows that digital systems no longer only analyze or visualize. They actively influence physical processes, take on tasks under real environmental conditions, and shift work from hazard zones into controllable structures. The decisive factor is not the individual drone, but the interplay of perception, autonomy, energy management, and human oversight.[1][8][9]
This is exactly the intersection where the Visoric expert team in Munich operates. The focus is on translating complex technical systems into clear models, visual structures, and understandable decision logic. Whether physical AI, autonomous systems, or industrial real time processes, the goal is not only to show technology, but to explain it, contextualize it, and make it strategically usable.

The Visoric expert team: Ulrich Buckenlei and Nataliya Daniltseva discussing autonomous systems, industrial AI, and the translation of complex technologies into understandable models
Source: VISORIC GmbH | Munich
Visoric connects analysis, systems understanding, and visual communication. The goal is not staging for its own sake, but clarity. How do autonomous systems work at industrial scale. Where are the operational opportunities and limits. How can safety, control, and efficiency be anchored as design principles from the start.
- Analytical classification of autonomous and AI driven industrial systems
- Concept design for visual models of complex technical relationships
- Translation of system logic into understandable narratives for decision makers
- Design of visualizations, simulations, and explanatory formats
- Connecting industrial reality, AI, and strategic communication
This article shows that physical AI is not a distant promise, but an operational development. If you are evaluating, introducing, or communicating autonomous systems, a conversation with the Visoric expert team offers a grounded, practical, and clear perspective on the next steps.
Contact Persons:
Ulrich Buckenlei (Creative Director)
Mobile: +49 152 53532871
Email: ulrich.buckenlei@visoric.com
Nataliya Daniltseva (Project Manager)
Mobile: +49 176 72805705
Email: nataliya.daniltseva@visoric.com
Address:
VISORIC GmbH
Bayerstraße 13
D-80335 Munich
