

Fliegende KI autonome Drohnen im industriellen Einsatz
Visualisierung: © Ulrich Buckenlei | Konzeptillustration autonomer Drohnen in einer industriellen Umgebung | Kein Anspruch auf technische Genauigkeit
Autonome fliegende Drohnen verändern industrielle Abläufe leise, aber grundlegend. Sie übernehmen Aufgaben, die für Menschen mit Risiken verbunden, ineffizient oder über längere Zeit nicht nachhaltig sind – etwa Arbeiten an kritischer Infrastruktur, in großen Höhen, bei extremen Wetterbedingungen oder in schwer zugänglichen Umgebungen. Was hier entsteht, ist kein Zukunftsszenario, sondern eine neue operative Realität.[1][2]
Die Visualisierung verdichtet diesen Wandel bewusst zu einem konzeptionellen Bild. Sie zeigt kein konkretes Produkt, sondern eine Idee: fliegende KI als aktiver Akteur innerhalb industrieller Systeme. Der Fokus liegt nicht auf technischer Detailtreue, sondern auf dem Zusammenspiel von Autonomie, physischer Arbeit und sicherem Abstand zum Menschen. Die Drohne erscheint hier nicht als Werkzeug, sondern als Teil eines verteilten intelligenten Systems.[1]
Hier beginnt ein struktureller Wandel. Industrielle Arbeit wird nicht länger ausschließlich um den menschlichen Körper herum organisiert, sondern um Sicherheit, Skalierbarkeit und Systemintelligenz. Autonome Drohnen markieren den Übergang von gelegentlichen Einsätzen zu kontinuierlich maschinengeführten Operationen in anspruchsvollen Umgebungen.[1][2]
Was fliegende KI industriell erstmals möglich macht
Industrierobotik ist seit vielen Jahren etabliert. Stationäre Systeme und automatisierte Maschinen übernehmen präzise Aufgaben in kontrollierten Umgebungen. Fliegende KI mit autonomen Drohnen erweitert dieses Spektrum um eine neue Fähigkeit: den flexiblen Zugang zu Arbeitsorten, die bodengebundene Systeme nur eingeschränkt oder mit erheblichem Aufwand erreichen können.[1][3]
Durch die Kombination aus Flugfähigkeit, mechanischen Funktionen und KI-gestützter Steuerung entstehen Systeme, die nicht nur inspizieren, sondern direkt an industrieller Infrastruktur arbeiten können. Drohnen können sich an Kabeln stabilisieren, entlang bestehender Netze bewegen und Aufgaben ausführen, die zuvor manuelle Teams, Spezialfahrzeuge oder temporäre Abschaltungen erforderten. Das eröffnet neue operative Möglichkeiten, insbesondere für großflächige oder exponierte Anlagen.[3][4]

Autonome Drohne im Einsatz: fliegende KI ermöglicht Arbeiten an schwer zugänglicher Infrastruktur
Visualisierung: © Ulrich Buckenlei | Konzeptillustration autonomer Drohnen in einer industriellen Umgebung | Kein Anspruch auf technische Genauigkeit
Industrieller Mehrwert entsteht nicht durch ein einzelnes Merkmal. Er ergibt sich aus dem Zusammenspiel von Mobilität, physischer Arbeitsfähigkeit, Energieversorgung und Steuerung. Fliegende KI ersetzt bestehende Verfahren nicht vollständig, sondern erweitert sie um neue räumliche und operative Optionen.[1][3]
- Erweiterte Reichweite → Arbeiten an exponierten oder schwer zugänglichen Orten
- Direkte Ausführung → Physische Aufgaben statt reiner Datenerfassung
- Prozessintegration → Anbindung an bestehende industrielle Abläufe
Dieses Zusammenspiel bildet die technische Grundlage für fliegende KI in industriellen Umgebungen. Das nächste Kapitel beleuchtet, wie diese Systeme physisch arbeiten, Kräfte aufnehmen und Stabilität erzeugen, während sie sich entlang bestehender Infrastruktur bewegen.
Wenn fliegende Systeme physische Arbeit ausführen
Allein das Fliegen macht eine Drohne noch nicht zu einem industriellen Arbeitsgerät. Der entscheidende Unterschied liegt in der Fähigkeit zur physischen Interaktion mit der Umgebung. Im industriellen Kontext bedeutet das: Kräfte aufnehmen, Stabilität herstellen und kontrollierte Bewegungen entlang bestehender Strukturen ausführen. Erst dann wird ein fliegendes System zu einer arbeitsfähigen Plattform.[1][3]
Für den industriellen Einsatz konzipierte autonome Drohnen stabilisieren sich gezielt an Kabeln, Trägern oder strukturellen Elementen. Diese Kontaktpunkte dienen nicht nur der Positionierung, sondern ermöglichen kontrollierte Bewegung und präzise Arbeitsausführung. Die Arbeit findet nicht im freien Flug statt, sondern durch gezielten Kontakt mit dem Objekt. Mechanik, Sensorik und Steuerung greifen ineinander, um sichere und wiederholbare Abläufe zu ermöglichen.[3][5]

Drohne im Kontaktbetrieb: Stabilisierung und kontrollierte Bewegung entlang eines Kabels
Visualisierung: © Ulrich Buckenlei | Konzeptillustration autonomer Drohnensysteme | Kein Anspruch auf technische Genauigkeit
Diese Arbeitsweise unterscheidet sich grundlegend von klassischen Inspektionsdrohnen. Statt ausschließlich Daten zu erfassen, wirken die Systeme direkt auf die Infrastruktur ein. Bewegungen folgen definierten Pfaden, Kräfte werden kontinuierlich gemessen und Anpassungen in Echtzeit vorgenommen. Dadurch entsteht Wiederholbarkeit, ohne dass jedes Manöver manuell geplant oder überwacht werden muss.[3][5]
- Stabilisierung → Physischer Kontakt ersetzt freies Schweben
- Kraftaufnahme → Mechanische Lasten werden kontrolliert beherrscht
- Geführte Bewegung → Aufgaben werden entlang bestehender Strukturen ausgeführt
Kapitel zwei zeigt, warum fliegende KI nicht als bloße Erweiterung konventioneller Drohnen verstanden werden sollte, sondern als eigenständige Arbeitsweise innerhalb industrieller Prozesse. Das nächste Kapitel widmet sich Energie, Ausdauer und Zuverlässigkeit als Grundlage für den Dauerbetrieb.
Vom einzelnen Flug zur systemischen Autonomie
An diesem Punkt verschiebt sich der Fokus von der einzelnen Drohne auf das übergeordnete System, in dem sie operiert. Fliegende KI im industriellen Einsatz funktioniert nicht als isoliertes Gerät, sondern als Teil eines kontinuierlich gesteuerten technischen Gefüges. Entscheidend ist nicht die einzelne Mission, sondern die Fähigkeit, Zustände zu erkennen, Entscheidungen abzuleiten und das Verhalten entsprechend anzupassen.[1][2]
Autonomie bedeutet hier keine vollständige Unabhängigkeit. Sie ist kontrollierte Selbststeuerung. Die Drohne bewertet kontinuierlich Parameter wie Energiezustand, Position, Missionskontext und Umgebungsbedingungen. Entscheidungen sind nicht vollständig vorprogrammiert, sondern werden innerhalb klar definierter Systemgrenzen getroffen. Das mentale Modell verschiebt sich vom Werkzeug zur operativen Einheit.[1][2]
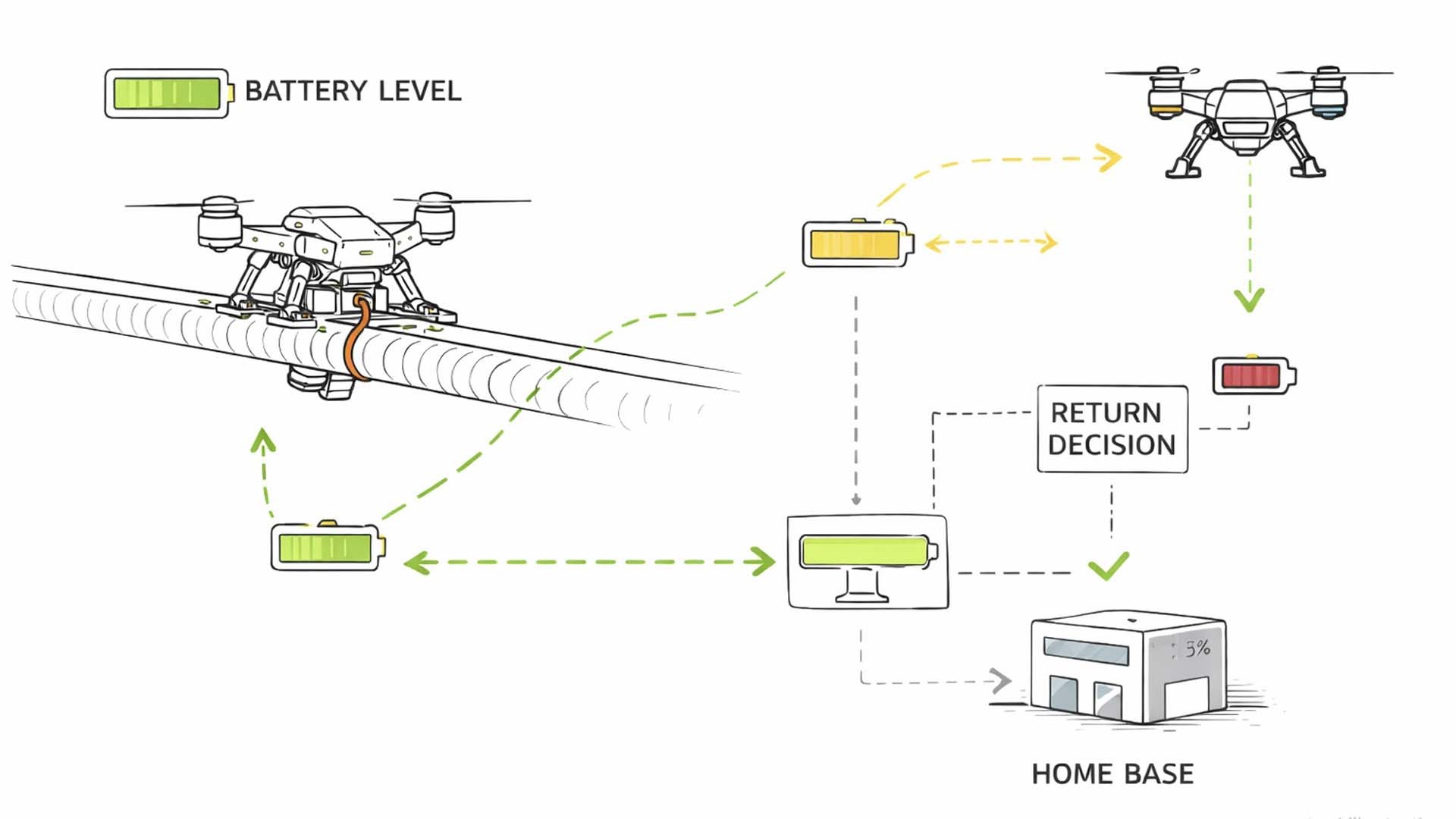
Konzeptionelle Autonomielogik: Energiezustand, Missionsentscheidungen und Rückkopplungsschleifen als Teil eines laufenden Systems
Visualisierung: © Ulrich Buckenlei | Konzeptillustration autonomer Drohnen in einer industriellen Umgebung | Kein Anspruch auf technische Genauigkeit
Besonders sichtbar wird dieser Systemcharakter im Energiemanagement. Die Frage ist nicht, ob eine Drohne fliegen kann, sondern wie lange, wie weit und unter welchen Bedingungen. Batteriestatus, Rückkehrentscheidungen und sichere Wartepositionen werden Teil einer kontinuierlichen Bewertung. Arbeit wird nicht unterbrochen, sondern moduliert. Forschungsansätze wie infrastrukturbasierte Ladelösungen und Langzeitbetrieb weisen klar in Richtung nachhaltiger Autonomie.[6][7]
- Systemische Autonomie → Entscheidungen entstehen aus Zustandsbewertung, nicht aus Einzelbefehlen
- Energie als Steuergröße → Batteriezustand prägt Mission, Verhalten und Rückkehr
- Kontrollierte Selbststeuerung → Autonomie innerhalb klar definierter Grenzen
Kapitel drei macht deutlich, dass fliegende KI nicht durch spektakuläre Einzelaktionen überzeugt, sondern durch verlässliche Systemlogik. Das nächste Kapitel beleuchtet, wie Autonomie mit menschlicher Kontrolle verbunden bleibt und warum Human in the Loop für industrielle Anwendungen zentral ist.
Human in the Loop Kontrolle bleibt beim Menschen
Mit zunehmender Autonomie verschiebt sich der Fokus von der Ausführung zur Überwachung. Autonome fliegende Drohnen agieren selbstständig im physischen Raum, ihre Entscheidungen existieren jedoch nicht isoliert. Sie sind eingebettet in Überwachungs-, Freigabe- und Eskalationsstrukturen, die menschliche Verantwortung aufrechterhalten.[8][9]
Operative Intelligenz liegt nicht allein in der Drohne, sondern im Zusammenspiel aus Sensorik, Missionslogik und externer Kontrolle. Menschen definieren Grenzen, überwachen Systemzustände und greifen ein, wenn es erforderlich ist. Autonomie bedeutet hier keinen Kontrollverlust, sondern eine bewusste Verlagerung von physischer Präsenz hin zu strategischer Aufsicht.[8][9]
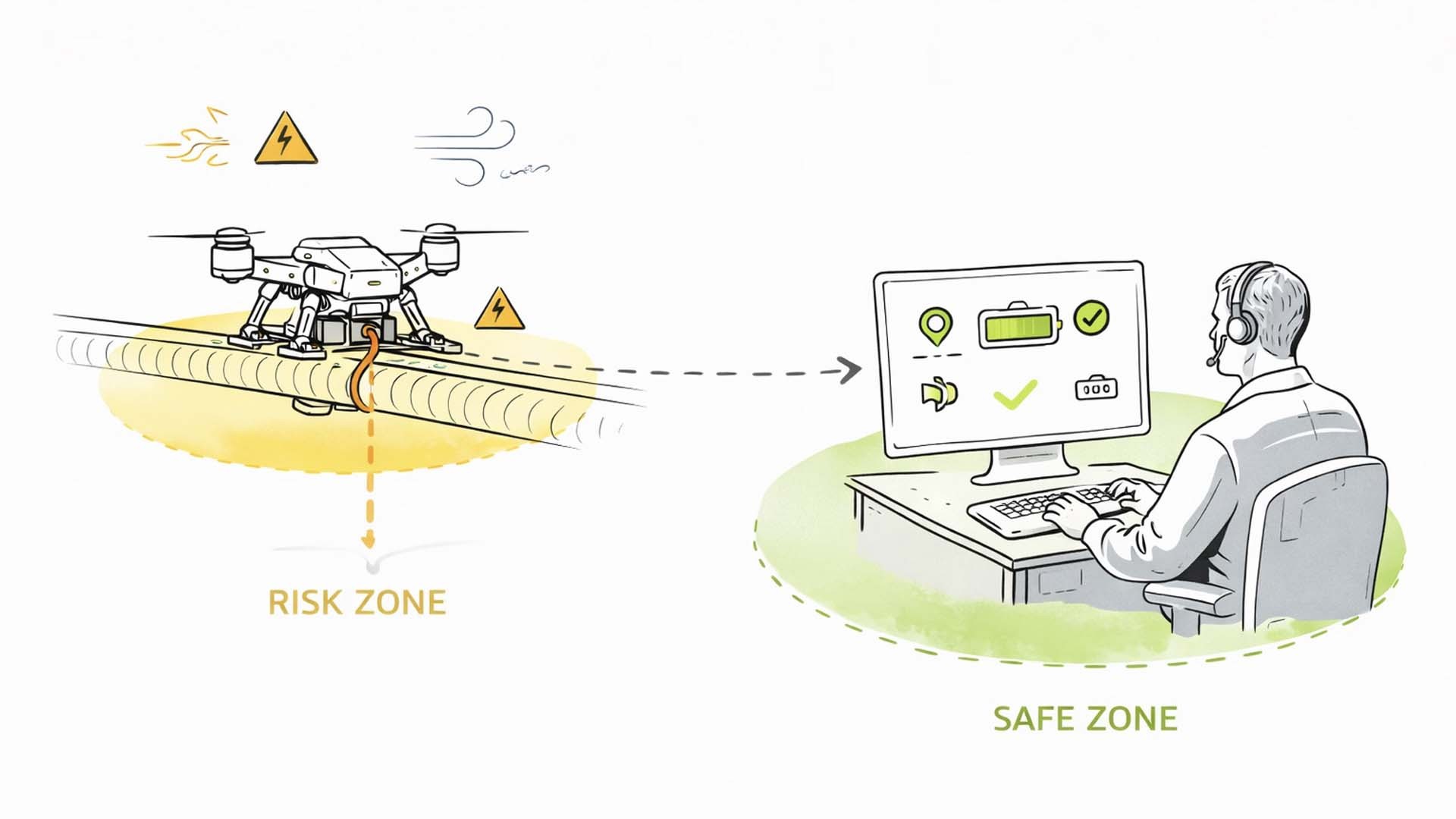
Human in the Loop Aufsicht: autonome Systeme handeln selbstständig und bleiben jederzeit überwachbar und steuerbar
Visualisierung: © Ulrich Buckenlei | Konzeptillustration | Kein Anspruch auf technische Genauigkeit
Diese Struktur ist für den industriellen Einsatz entscheidend. Autonome Systeme übernehmen gefährliche und schwer zugängliche Aufgaben, ohne Verantwortung auszulagern. Menschen bleiben Teil der Entscheidungskette – nicht als Steuerer einzelner Bewegungen, sondern als Instanz für Bewertung, Freigabe und Eingriff.
Gerade bei kritischer Infrastruktur ist das von besonderer Bedeutung. Sicherheit entsteht nicht durch maximale Autonomie, sondern durch klar definierte Kontrollpunkte, transparente Systemzustände und die Möglichkeit menschlicher Intervention – im Einklang mit strukturierten Risikoanalyseverfahren aus dem zivilen Drohnenbetrieb.[8][9]
- Aufsicht statt permanenter Präsenz → Kontrolle aus sicherer Distanz
- Eskalationslogik → Menschlicher Eingriff bei Grenzfällen und Abweichungen
- Verantwortung bleibt erhalten → Autonomie ersetzt keine Aufsicht
Damit wird deutlich, dass moderne industrielle KI nicht auf vollständige Unabhängigkeit abzielt. Ziel ist ein robustes Zusammenspiel aus maschineller Ausführung und menschlicher Kontrolle. Dieses Gleichgewicht bereitet den nächsten Schritt vor: Systeme so zu gestalten, dass sie langfristig sicher, skalierbar und verantwortungsvoll bleiben.
Sicherheit als Gestaltungsprinzip statt nachträglicher Maßnahme
Der Fokus verschiebt sich nun von räumlicher Trennung hin zur Rolle der KI selbst. Sicherheit wird nicht mehr primär durch Isolation oder starre Regeln erreicht, sondern durch kontinuierliche Bewertung. KI analysiert Systemzustände, erkennt Abweichungen und schätzt Risiken in Echtzeit ein – häufig bevor Probleme für Menschen sichtbar oder spürbar werden.[1][10]
KI ist dabei kein unabhängiger Akteur im Sinne unkontrollierter Eigenständigkeit. Sie fungiert als vermittelnde Schicht zwischen physischer Realität und menschlicher Aufsicht. Sensordaten, Zustandsvariablen und Kontextinformationen fließen zusammen und unterstützen Entscheidungen, die nachvollziehbar und überprüfbar bleiben. Sicherheit wird nicht administriert, sondern in die Systemarchitektur eingebettet.[1][8][10]
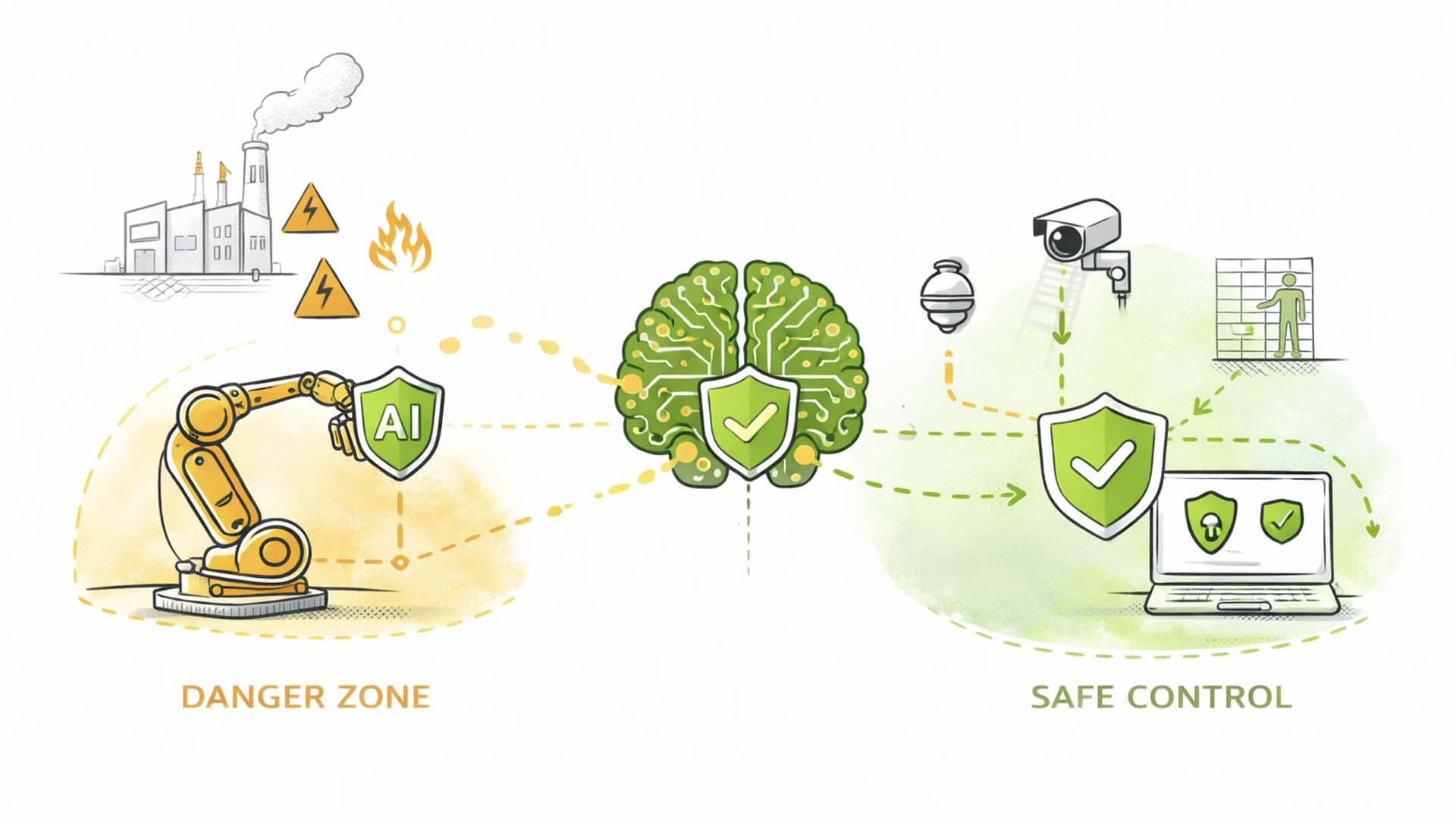
KI als Sicherheitsschicht: Zustandsanalyse, Entscheidungslogik und menschliche Aufsicht im Zusammenspiel
Illustration: konzeptionelle Darstellung | Kein Anspruch auf technische Verifikation
Diese Logik verändert industrielle Verantwortung. Menschen bleiben Teil der Entscheidungskette, greifen jedoch dort ein, wo Bewertung und Steuerung sinnvoll sind – nicht dort, wo physische Gefahr besteht. Sichere Systeme entstehen daher im Design, nicht an den Rändern des Prozesses.[8][9]
- KI als Bewertungsebene → Sicherheit entsteht durch kontinuierliche Analyse
- Menschliche Aufsicht → Entscheidungen bleiben überprüfbar und auditierbar
- Gestaltung statt Reaktion → Sicherheit ist systemisch verankert
Dieses Kapitel markiert den Übergang von räumlicher Trennung zu intelligenter Steuerung. Der nächste Abschnitt zeigt, wie sich solche Systeme in industrielle Abläufe integrieren und welche Rolle autonome Prozesse und Infrastruktur dabei spielen.
Autonomie entsteht aus dem Zusammenspiel von Systemen
Der Fokus liegt nun nicht mehr auf der einzelnen Maschine, sondern auf dem Gesamtsystem. Autonome Drohnen entfalten ihre Wirkung nicht isoliert, sondern als Teil verteilter Infrastruktur. Sensorik, Navigation, Energiemanagement und Entscheidungslogik greifen ineinander und ermöglichen kontinuierlichen Betrieb in komplexen industriellen Umgebungen.[1][2]
Die dargestellten Systeme zeigen, dass Autonomie nicht bedeutet, ohne Aufsicht zu handeln. Robuste Prozesse entstehen durch klar definierte Übergänge zwischen automatisierter Ausführung, Zustandsüberwachung und menschlicher Kontrolle. Die Drohne agiert selbstständig innerhalb definierter Parameter und bleibt zugleich in ein übergeordnetes System eingebettet.[8][9]
- Verteilte Intelligenz → Autonomie entsteht aus mehreren Subsystemen
- Kontinuierlicher Betrieb → Energie, Navigation und Aufgabensteuerung greifen ineinander
- Klare Verantwortlichkeiten → Automatisierung mit definierten Eingriffspunkten
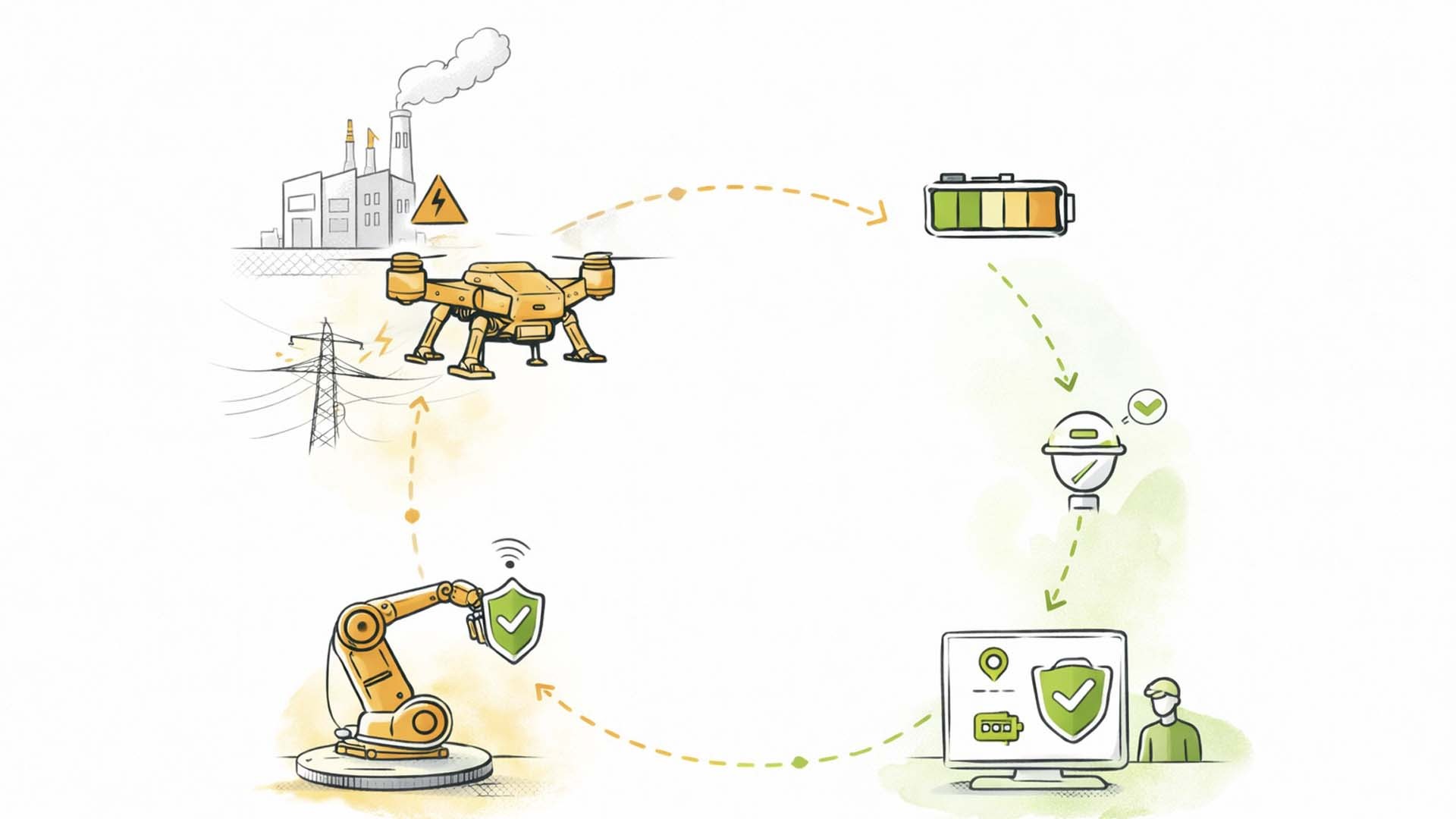
Autonome Drohnen als Teil eines verteilten Systems: Navigation, Energiezustand und Missionslogik werden kontinuierlich koordiniert
Illustration: © Ulrich Buckenlei | Konzeptillustration | Kein Anspruch auf technische Genauigkeit
Diese systemische Perspektive unterscheidet moderne industrielle KI von früheren Automatisierungsansätzen. Im Mittelpunkt stehen nicht einzelne Funktionen, sondern das Zusammenspiel von Daten, Zuständen und Entscheidungen. Autonomie wird zur Frage von Architektur und Prozessdesign, nicht maximaler Unabhängigkeit.[1][2]
Video Physische KI im industriellen Einsatz unter realen Bedingungen
Das folgende Video zeigt autonome Drohnen bei Arbeiten an kritischer Infrastruktur. Der Fokus liegt nicht auf einem einzelnen Gerät, sondern auf der Kombination aus Wahrnehmung, gezielter Interaktion mit der Umgebung und sicherem Abstand zum Menschen. Physische KI wird dort real, wo Arbeit wetterabhängig, schwer zugänglich oder risikobehaftet ist.
Die Sequenzen machen sichtbar, was im Text abstrakt bleibt. Diese Systeme arbeiten unter physischen Einschränkungen, reagieren auf Widerstände, stabilisieren sich während der Bewegung und führen Aufgaben aus, die zuvor erhebliche Risiken erforderten. Industrielle Arbeit verlagert sich schrittweise von Vor-Ort-Exposition hin zu überwachter Ausführung.[1][3]
Videostandbild als konzeptionelle Illustration im XR Stager Stil ohne Anspruch auf technische Genauigkeit
Videomaterial aus öffentlich zugänglichem Industriefilmmaterial Rechte verbleiben bei den jeweiligen Rechteinhabern redaktionelle Analyse und Kontext von Ulrich Buckenlei
Hinweis Das Video ist zu journalistischen und analytischen Zwecken eingebettet und für die mobile Wiedergabe einschließlich iOS optimiert
Das Filmmaterial unterstreicht, dass physische KI kein fernes Versprechen ist, sondern bereits in Hochrisiko-Industrieumgebungen eingesetzt und erprobt wird. Der entscheidende Faktor ist die neue operative Logik. Autonomie bedeutet nicht grenzenloses Handeln, sondern kontrollierte Ausführung innerhalb klarer Regeln, Transparenz und Verantwortlichkeit.[8][9]
- Verkörperte Autonomie → Systeme reagieren auf reale Kräfte und Materialverhalten
- Energieautonomie → Laden, Pausieren und Fortsetzen werden Teil der Missionslogik
- Sicherheit durch Design → Arbeit verlagert sich aus der Gefahrenzone in sichere Aufsicht
Quellen und Forschungsreferenzen
- ArXiv, „AI Powered Aerial Robots for Inspection and Maintenance“, 2024. Überblick über integrierte luftgestützte Robotersysteme für Inspektion und Wartung, einschließlich Autonomie, Operator-Unterstützung und Reichweitenkonzepte. [1]
- MDPI, „Aerial Robotics for Inspection and Maintenance“, Buchsammlung, 2024. Breiter Überblick über luftgestützte Robotik in Inspektions- und Wartungskontexten, einschließlich physischer Interaktionsszenarien. [2]
- Research paper, „A Powerline Inspection UAV Equipped with Dexterous Lockable Gripping Mechanisms for Autonomous Perching and Contact Rolling“, 2024. Beschreibt Andock- und Kontaktrollmechanismen für Stromleitungsinspektionen und Störrobustheit. [3]
- ScienceDirect, „Deep Learning in Automated Power Line Inspection A Review“, 2025. Überblick über moderne Stromleitungsinspektionsansätze einschließlich Vision-Systemen und automatisierten Analysepipelines. [4]
- MDPI Drones, „A Review of Real Time Implementable Cooperative Aerial Manipulation“, 2024. Überblick über luftgestützte Manipulationssysteme und Steuerungsansätze in realen Umgebungen. [5]
- ICRA paper, „Autonomous Overhead Powerline Recharging for Uninterrupted Drone Operations“, 2024. Zeigt autonome Landung und Ladeansätze nahe Stromleitungen für dauerhaften Betrieb. [6]
- Applied Sciences, „A Novel Charging Station on Overhead Power Lines for Drone Applications“, 2023. Beschreibt Energiegewinnung aus magnetischen Feldern von Stromleitungen zur Überwindung von Reichweitenbegrenzungen. [7]
- EASA, „Specific Operations Risk Assessment SORA“, Methodenseite. Beschreibt Risikoklassifizierung und Minderungslogik für zivile Drohneneinsätze in der spezifischen Kategorie. [8]
- ISO, „Unmanned Aircraft Systems Requirements for Safe Commercial Operations“, veröffentlicht 2023. Definiert Anforderungen für sichere kommerzielle UAS-Einsätze einschließlich Betriebsverfahren und sicherheitskritischer Dienste. [9]
- Cybersecurity guidance, „Unmanned Aircraft Systems Addressing Critical Infrastructure Security Challenges“, 2024. Diskutiert Sicherheitsrisiken und operative Aspekte von Drohnen im Kontext kritischer Infrastruktur. [10]
Wenn autonome Systeme industrielle Realität werden
Der Einsatz autonomer fliegender KI in industriellen Umgebungen zeigt, dass digitale Systeme nicht länger nur analysieren oder visualisieren. Sie greifen aktiv in physische Prozesse ein, übernehmen Aufgaben unter realen Umweltbedingungen und verlagern Arbeit aus Gefahrenzonen in kontrollierbare Strukturen. Entscheidend ist nicht die einzelne Drohne, sondern das Zusammenspiel von Wahrnehmung, Autonomie, Energiemanagement und menschlicher Aufsicht.[1][8][9]
Genau an dieser Schnittstelle arbeitet das Visoric Expertenteam in München. Im Fokus steht die Übersetzung komplexer technischer Systeme in klare Modelle, visuelle Strukturen und verständliche Entscheidungslogik. Ob physische KI, autonome Systeme oder industrielle Echtzeitprozesse – das Ziel ist nicht nur, Technologie zu zeigen, sondern sie zu erklären, einzuordnen und strategisch nutzbar zu machen.

Das Visoric Expertenteam: Ulrich Buckenlei und Nataliya Daniltseva im Austausch über autonome Systeme, industrielle KI und die Übersetzung komplexer Technologien in verständliche Modelle
Quelle: VISORIC GmbH | München
Visoric verbindet Analyse, Systemverständnis und visuelle Kommunikation. Ziel ist nicht Inszenierung um ihrer selbst willen, sondern Klarheit. Wie funktionieren autonome Systeme im industriellen Maßstab. Wo liegen operative Chancen und Grenzen. Wie lassen sich Sicherheit, Kontrolle und Effizienz von Beginn an als Gestaltungsprinzipien verankern.
- Analytische Einordnung autonomer und KI gestützter industrieller Systeme
- Konzeptdesign für visuelle Modelle komplexer technischer Zusammenhänge
- Übersetzung von Systemlogik in verständliche Narrative für Entscheider
- Gestaltung von Visualisierungen, Simulationen und erklärenden Formaten
- Verbindung von industrieller Realität, KI und strategischer Kommunikation
Dieser Artikel zeigt, dass physische KI kein fernes Versprechen ist, sondern eine operative Entwicklung. Wenn Sie autonome Systeme evaluieren, einführen oder kommunizieren, bietet ein Gespräch mit dem Visoric Expertenteam eine fundierte, praxisnahe und klare Perspektive auf die nächsten Schritte.
Kontaktpersonen: Nataliya Daniltseva (Projektleiterin) Adresse:
Ulrich Buckenlei (Kreativdirektor)
Mobil: +49 152 53532871
E-Mail: ulrich.buckenlei@visoric.com
Mobil: + 49 176 72805705
E-Mail: nataliya.daniltseva@visoric.com
VISORIC GmbH
Bayerstraße 13
D-80335 München