

Spatial Flight Control, wie echte 3D Flugsteuerung industrielle Drohnensysteme neu definiert
Visualisierung: © Ulrich Buckenlei | Konzeptillustration räumlicher Flugsteuerung autonomer Systeme | Redaktionelle Darstellung ohne Anspruch auf technische Detailtreue
Autonome Drohnensysteme haben sich rasant weiterentwickelt, doch ein Kernprinzip ist vielerorts gleich geblieben. Die meisten Multikopter bewegen sich horizontal, indem sie den gesamten Körper neigen. Das ist effizient und robust, koppelt aber Orientierung und Bewegung so eng, dass Präzision und Interaktion in komplexen Umgebungen schnell an Grenzen stoßen. In industriellen Szenarien, in denen Nähe zu Infrastruktur, enge Räume, Turbulenzen und sicherheitskritische Prozesse zusammenkommen, wird genau diese Kopplung zum limitierenden Faktor.[1][2]
Spatial Flight Control beschreibt den Übergang von flächenbasierter Fluglogik zu echter Raumkontrolle. Gemeint ist eine Steuerung, bei der Translation und Orientierung nicht mehr zwangsläufig gemeinsam passieren, sondern als getrennte Größen geregelt werden. Raum wird nicht länger wie eine Ebene behandelt, sondern als Volumen, in dem Position, Richtung, Rotation und Arbeitsabstand gleichzeitig stabil kontrollierbar bleiben sollen. Das wirkt zunächst wie ein Spezialthema für Forschung, ist in Wahrheit aber ein neues Kontrollparadigma mit direkten Folgen für industrielle Automatisierung, Sicherheitsarchitektur und Systemdesign.[1][3]
Die Visualisierung verdichtet diesen Wandel bewusst zu einem konzeptionellen Bild. Sie zeigt kein konkretes Produkt, sondern eine Idee, nämlich Flugroboter, die ihre räumliche Bahn stabil halten können, während sie ihre Lage aktiv verändern. Der Fokus liegt nicht auf mechanischer Detailtreue, sondern auf der Steuerlogik dahinter, also auf der Frage, wie ein System Kräfte und Drehmomente so verteilt, dass Raumkontrolle auch bei dynamischer Orientierung zuverlässig bleibt.[2][3]
Warum klassische Fluglogik an ihre Grenzen stößt
Konventionelle Multikopter erzeugen horizontale Bewegung durch Neigung. Damit bleibt der Flug grundsätzlich stabil, doch Orientierung und Bahn sind physikalisch gekoppelt. Sobald das System rollt oder nickt, kippt automatisch der Schubvektor, und der Bewegungspfad verändert sich. Für einfache Missionen ist das effizient. Für präzises Arbeiten in engen, dynamischen oder sicherheitskritischen Umgebungen entsteht jedoch ein strukturelles Problem: Jede Korrektur verändert gleichzeitig Lage, Blickrichtung, Abstand zur Umgebung und die resultierende Trajektorie.[3][4]
Das neue Motorenkonzept im Bild macht genau diesen Engpass sichtbar. Statt starrer Propellerachsen nutzt das System zwei gegenläufige Rotoren pro Antriebseinheit und eine aktive Lagerung mit bis zu 160° Gelenkweg. Dadurch kann der Schubvektor gezielt ausgerichtet werden, ohne den gesamten Körper der Drohne in dieselbe Richtung kippen zu müssen. Die Plattform bleibt aerodynamisch ruhiger, während die Antriebe die Richtungsarbeit übernehmen. Translation wird damit nicht mehr aus Neigung abgeleitet, sondern aus aktiv gesetzter Schubrichtung.[1][3]
In Industrieanlagen wird der Nutzen unmittelbar. Wer nahe an Rohren, Trägern, Maschinen oder Leitungen arbeitet, braucht reproduzierbare Bewegungen und stabile Sicherheitsabstände. In der klassischen Logik werden diese Anforderungen häufig über konservative Flugprofile, größere Radien oder zusätzliche Infrastruktur gelöst. Mit schwenkbaren, doppelt gelagerten Antriebseinheiten lässt sich Raum hingegen feinfühliger steuern, weil Mikro Korrekturen an den Motoren erfolgen, nicht am gesamten Flugkörper. Das reduziert Drift, erleichtert präzise Annäherungen und stabilisiert die Interaktion in Engstellen.[1][4]

Doppelrotor und 160° Gelenk: Schubvektor wird aktiv ausgerichtet, Orientierung und Bahn werden entkoppelt
Visualisierung: © Ulrich Buckenlei | Konzeptillustration | Redaktionelle Darstellung
Der entscheidende Punkt ist nicht Geschwindigkeit, sondern Kontrolle. Solange Orientierung und Translation gekoppelt bleiben, ist Raum nicht frei steuerbar, sondern ein Nebenprodukt der Lage. Schwenkbare Doppelrotor-Antriebe verschieben die Logik: Raum wird zum primären Regelgegenstand, während die Körperhaltung sekundär wird. Genau hier beginnt der Übergang von klassischer Multikopter Logik zu Spatial Flight Control.[1][3]
- Gekoppelte Bewegung → Neigung erzeugt Translation und verändert den Schubvektor
- Aktive Vektorisierung → Doppelrotor plus 160° Gelenk richtet Schub unabhängig vom Körper aus
- Mehr Präzision in Engstellen → Korrekturen passieren an den Antrieben, nicht durch Gesamtkippung
Diese drei Punkte markieren nicht nur technische Unterschiede, sondern einen strukturellen Bruch in der Fluglogik. Während klassische Multikopter Stabilität durch möglichst geringe Lageänderungen erzwingen, entsteht Stabilität hier durch kontinuierliche, fein aufgelöste Regelung der Schubvektoren. Das System akzeptiert Bewegung als Normalzustand und kompensiert sie lokal an den Antrieben, statt global am gesamten Körper.
Gerade in industriellen Szenarien wird dieser Unterschied entscheidend. Wenn Drohnen entlang von Leitungen, in Schächten, zwischen Trägern oder nahe an empfindlicher Infrastruktur operieren, ist es nicht ausreichend, „ruhig zu fliegen“. Entscheidend ist, Abstände, Blickrichtungen und Kontaktzonen unabhängig voneinander kontrollieren zu können. Die räumliche Freiheit entsteht nicht durch Stillstand, sondern durch kontrollierte, entkoppelte Bewegung.
Damit verändert sich auch die Rolle der Flugregelung. Sie optimiert nicht mehr primär Lage und Winkel, sondern räumliche Zustände, Abstände und Relationen. Orientierung wird sekundär, Raum primär. Genau hier beginnt der Übergang von klassischer Multikopter-Logik zu Spatial Flight Control. Nicht als zusätzliches Feature, sondern als neues Paradigma der Flugsteuerung.[1][3]
Das nächste Kapitel zeigt, was räumliche Flugsteuerung technisch bedeutet, und warum sie weniger eine Erweiterung bestehender Systeme als eine neue Klasse von Regelarchitekturen darstellt.
Spatial Flight Control – Raum wird zum steuerbaren Volumen
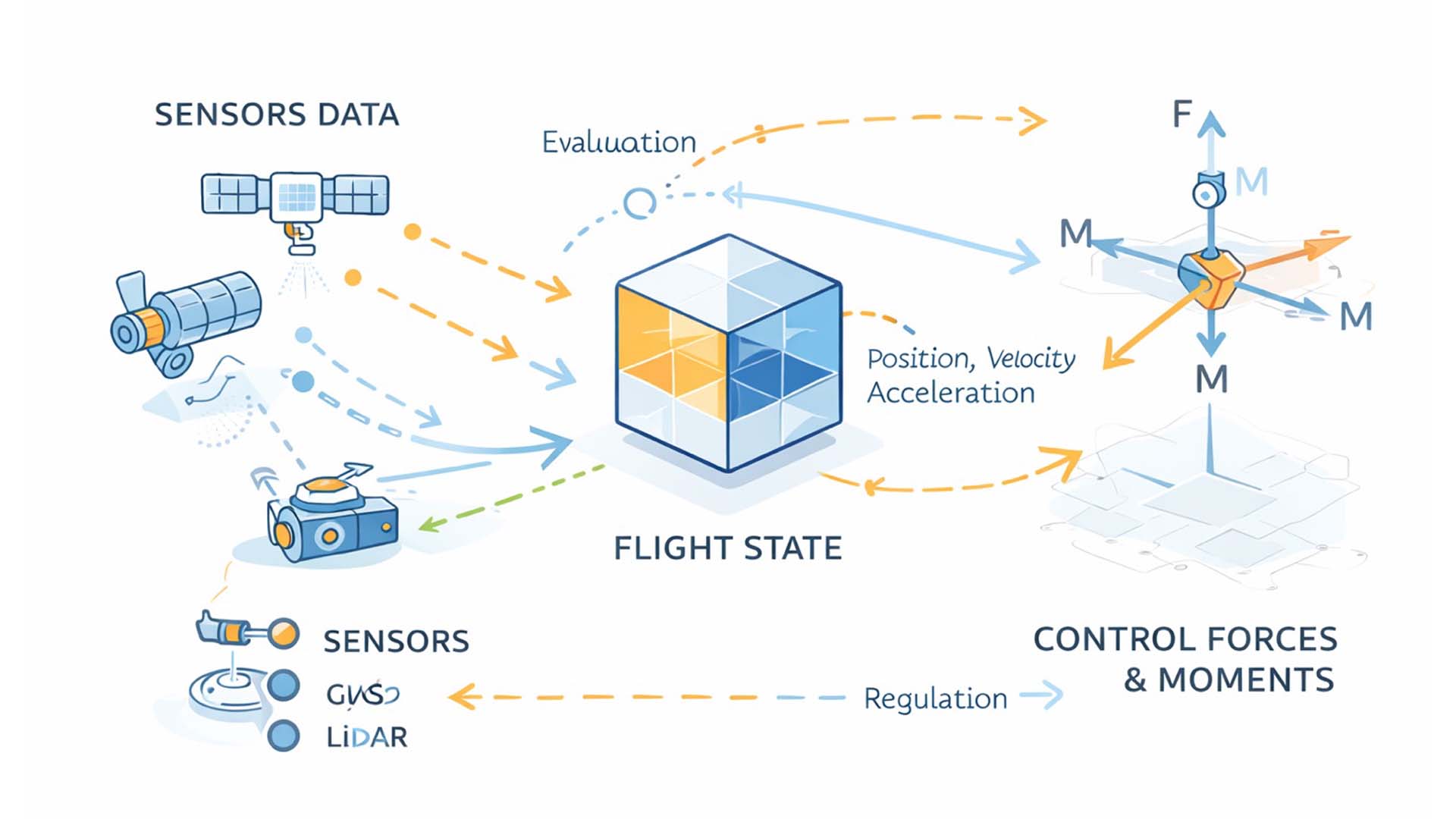
Spatial Flight Control beschreibt einen Regelungsansatz, bei dem der Raum selbst zum primären Steuerobjekt wird. Der Flugroboter erfasst kontinuierlich seinen vollständigen dreidimensionalen Zustand und behandelt Position, Geschwindigkeit, Beschleunigung sowie Rotationsgrößen wie Roll, Nick und Gier nicht mehr als abhängige Ketten, sondern als gleichrangige Regelgrößen. Entscheidend ist dabei nicht, eine bestimmte Lage einzuhalten, sondern definierte räumliche Zustände stabil zu halten – unabhängig davon, wie sich die Plattform dabei orientiert.[1][5]
Damit verändert sich das Verständnis von Flug grundlegend. Bewegung entsteht nicht mehr aus einer Abfolge von Lageänderungen, sondern aus der direkten Regelung von Raumkoordinaten. Orientierung wird zu einer frei wählbaren Variable innerhalb klar definierter Grenzen, während der Bewegungsvektor aktiv und kontinuierlich kontrolliert wird. Der Flugroboter folgt nicht mehr impliziten aerodynamischen Zwängen, sondern expliziten räumlichen Zielgrößen.[1][5]
Dieses Prinzip wird in der Visualisierung bewusst abstrahiert dargestellt. Statt eines konkreten Fluggeräts zeigt das Bild den Regelungsraum selbst: Zustandsgrößen, Rückkopplungen und Korrekturen sind als miteinander verbundene Ebenen visualisiert. Kräfte, Orientierung und Bewegung erscheinen nicht als mechanische Effekte, sondern als steuerbare Parameter innerhalb eines kontinuierlichen Regelkreises. Raum wird hier nicht durch Geometrie beschrieben, sondern durch Zustände und Übergänge.[5]
Räumliche Regelung – Orientierung und Translation werden als getrennte Größen kontrolliert
Visualisierung: © Ulrich Buckenlei | Konzeptillustration | Redaktionelle Darstellung
Stabilität entsteht in diesem Modell nicht durch das Vermeiden von Abweichungen, sondern durch deren aktive Kompensation. Das System erlaubt Rotation, Beschleunigung und lokale Störungen, reagiert jedoch unmittelbar durch gezielte Anpassung der Kraft- und Momentenverteilung. Stabilität ist damit kein statischer Zielzustand mehr, sondern ein dynamisches Gleichgewicht, das fortlaufend neu berechnet und angepasst wird.[1][5]
Diese Form der Regelung stellt hohe Anforderungen an die zugrunde liegende Systemarchitektur. Sensorik, Zustandsschätzung und Regelalgorithmen müssen eng verzahnt arbeiten. Inertialsensoren liefern hochfrequente Bewegungsdaten, visuelle Odometrie und LiDAR erfassen relative Raumstrukturen, während GNSS RTK globale Referenzen bereitstellt. Erst durch die Echtzeitfusion dieser Daten entsteht ein konsistenter Zustandsraum, in dem räumliche Steuerung zuverlässig möglich ist.[5][6]
- Entkopplung → Orientierung bestimmt nicht automatisch den Bewegungsvektor
- Kontinuierliche Kompensation → Stabilität entsteht durch permanente Rückkopplung
- Volumetrische Navigation → Raum wird als regelbares Volumen verstanden
Diese Punkte markieren mehr als eine technische Weiterentwicklung. Sie stehen für einen Perspektivwechsel: Flug wird nicht länger als Bewegung entlang einer Linie interpretiert, sondern als kontrollierter Aufenthalt innerhalb eines definierten Raumbereichs. Der Roboter „hält“ kein Ziel, sondern bleibt innerhalb eines Volumens, das durch Abstände, Toleranzen und Prozessgrenzen beschrieben ist. Damit nähert sich Flugregelung der Logik industrieller Bewegungssteuerung an, wie sie aus Robotik und Automatisierung bekannt ist.[1][5]
Gerade für industrielle Anwendungen ist dieser Übergang entscheidend. Prozesse verlangen Wiederholbarkeit, Vorhersagbarkeit und klare Zustandsmodelle. Spatial Flight Control schafft die Grundlage dafür, Flugroboter nicht als bewegliche Sensorplattformen zu betrachten, sondern als räumlich arbeitende Systeme, die sich präzise in bestehende Abläufe integrieren lassen. Flug wird damit Teil eines kontrollierten Prozesses – nicht eines improvisierten Manövers.[1][5]
Innovationspotenzial, präzise Arbeit statt spektakulärer Manöver
Der industrielle Wert von Spatial Flight Control liegt nicht im visuellen Effekt einzelner Flugmanöver, sondern in der Fähigkeit, Raum als stabilen Arbeitsbereich zu definieren und zuverlässig einzuhalten. Während klassische Drohnensysteme Bewegung primär als Abfolge von Lagen und Übergängen verstehen, zeigt die dargestellte Regelungslogik einen anderen Ansatz. Die Plattform hält sich innerhalb eines klar begrenzten Volumens, während Orientierung, Rotation und lokale Ausgleichsbewegungen aktiv zugelassen werden. Flug wird damit nicht als dynamische Kür, sondern als kontrollierter Zustand interpretiert.[2][4]
Die Illustration macht diesen Unterschied deutlich. Das gestrichelte Raumvolumen beschreibt keinen idealisierten Pfad, sondern einen zulässigen Arbeitsbereich. Innerhalb dieses Volumens kann sich die Plattform bewegen, rotieren und ausgleichen, ohne den definierten räumlichen Zustand zu verlassen. Die eingezeichneten Bewegungsbahnen zeigen, dass Korrekturen nicht über globale Lageänderung erfolgen, sondern über lokale Anpassung der Antriebe. Rotation wird nicht vermieden, sondern gezielt genutzt, solange Position, Abstand und Prozessgrenzen eingehalten bleiben.[2][4]
Gerade bei Inspektions-, Vermessungs- oder Überwachungsaufgaben entsteht daraus ein entscheidender Vorteil. Sensoren und Kameras müssen nicht mehr durch eine erzwungene Fluglage ausgerichtet werden. Stattdessen kann die Plattform ihre Orientierung flexibel anpassen, während die Raumposition stabil bleibt. Abstände zu Anlagen, Bauteilen oder Strukturen lassen sich konstant halten, selbst bei Turbulenzen, thermischen Effekten oder externen Störungen. Die Regelung greift dort ein, wo Abweichungen entstehen, nicht dort, wo sie sichtbar werden.[2][6]

Industrielle Präzision, stabile Raumpositionierung auch bei aktiver Lageänderung
Visualisierung: © Ulrich Buckenlei | Konzeptillustration | Redaktionelle Darstellung
Entscheidend ist dabei der Perspektivwechsel in der Bewertung solcher Systeme. Die Qualität eines Flugroboters bemisst sich nicht länger an Reichweite, Maximalgeschwindigkeit oder spektakulären Manövern, sondern an der Zuverlässigkeit, mit der definierte räumliche Zustände eingehalten werden. Das im Bild dargestellte Raumvolumen wird zur eigentlichen Referenzgröße. Solange sich das System innerhalb dieser Grenzen bewegt, bleibt der Prozess stabil, unabhängig von momentaner Lage oder Rotation.[1][2]
- Präzisionsarbeit → stabile Raumpositionierung innerhalb definierter Volumina
- Enge Umgebungen → Navigation ohne Zwang zur permanenten Lagekorrektur
- Prozessintegration → Flug wird zu einem kontrollierten Arbeitsschritt
Diese Eigenschaften markieren keinen inkrementellen Fortschritt, sondern eine funktionale Verschiebung. Flugroboter entwickeln sich von mobilen Sensorträgern zu räumlich arbeitenden Systemen, die Zustände, Abstände und Toleranzen aktiv einhalten. Die Logik ähnelt zunehmend industrieller Automatisierung: klar definierte Arbeitsräume, zulässige Abweichungen und kontinuierliche Regelung statt punktueller Korrektur. Spatial Flight Control bildet damit die Grundlage, Flug als verlässliche industrielle Fähigkeit zu etablieren, nicht als Ausnahmebetrieb.
Im nächsten Kapitel geht es darum, wie diese Form räumlicher Kontrolle in autonome Betriebslogik übersetzt wird. Also nicht als einzelnes Manöver, sondern als systemische Fähigkeit, die kontinuierlich, selbstständig und zuverlässig arbeitet.
Vom Manöver zur Systemlogik, Autonomie als kontrollierte Selbststeuerung
Sobald räumliche Flugsteuerung zuverlässig beherrscht wird, verschiebt sich der Fokus grundlegend. Nicht mehr das einzelne Manöver steht im Zentrum, sondern die Systemlogik, die Zustände bewertet, priorisiert und daraus konsistentes Verhalten ableitet. Entscheidend ist nicht, ob ein Flugroboter eine Bewegung technisch ausführen kann, sondern ob er fortlaufend versteht, in welchem Zustand er sich befindet, welche Optionen zulässig sind und welche Konsequenzen sein Handeln hat. Autonomie bedeutet in diesem Kontext nicht Freiheit ohne Einschränkungen, sondern kontrollierte Selbststeuerung innerhalb klar definierter Regeln, Grenzen und Verantwortlichkeiten. Das System handelt eigenständig, aber nicht ungebunden.[2][7]
Im Zentrum dieser Architektur steht eine kontinuierliche Zustandsbewertung. Der Flugroboter erfasst permanent Sensorinformationen, Energiezustand, räumliche Position, Geschwindigkeit, Abstände zu Objekten, Missionsfortschritt sowie interne Systemparameter. Diese Daten werden nicht isoliert verarbeitet, sondern in einem gemeinsamen Zustandsraum zusammengeführt. Erst diese konsolidierte Sicht erlaubt es, Entscheidungen nicht reaktiv, sondern kontextbewusst zu treffen. Verhalten entsteht nicht durch starre Ablaufpläne, sondern durch die fortlaufende Bewertung dieses Zustandsraums und die Auswahl geeigneter Handlungsoptionen innerhalb definierter Grenzen.[2][7]
Gerade bei Spatial Flight Control gewinnt diese Systemlogik besondere Bedeutung. Die Entkopplung von Orientierung und Translation erweitert den Handlungsspielraum erheblich, erhöht aber zugleich die Komplexität der Zustandsüberwachung. Das System muss nicht nur wissen, wo es sich befindet, sondern auch wie stabil dieser Zustand ist, welche Energie- und Regelungsreserven verfügbar sind und welche Abweichungen noch tolerierbar bleiben. Autonomie entsteht hier nicht durch maximale Bewegungsfreiheit, sondern durch die Fähigkeit, Freiheitsgrade situationsabhängig zu begrenzen und verantwortungsvoll zu nutzen.[7][8]

Systemische Autonomie, Zustandsschätzung, Missionslogik und Rückkopplung als kontinuierlicher Regelkreis
Visualisierung: © Ulrich Buckenlei | Konzeptillustration | Redaktionelle Darstellung
Die Illustration verdeutlicht diese Logik als geschlossenen Regelkreis. Sensorik, Zustandsmodell, Missionskontext und Entscheidungslogik sind nicht linear miteinander verbunden, sondern stehen in permanenter Rückkopplung. Energieverfügbarkeit, Umgebungsbedingungen und Sicherheitsgrenzen fließen kontinuierlich in die Bewertung ein und beeinflussen das Verhalten des Systems in Echtzeit. Entscheidungen werden nicht einmalig getroffen, sondern fortlaufend überprüft, angepasst oder zurückgenommen. Rückkehrstrategien, sichere Wartepositionen, Leistungsreduktion oder Missionsabbruch sind integraler Bestandteil der Autonomie, nicht nachträgliche Sicherheitsmechanismen.[7][8]
Für industrielle Anwendungen ist genau diese Architektur entscheidend. Skalierung entsteht nicht durch das Weglassen von Kontrolle, sondern durch ihre Formalisierung. Ein autonomes System muss erklärbar bleiben, vorhersehbar reagieren und definierte Eingriffspunkte bieten. Spatial Flight Control ist daher weniger ein einzelner Algorithmus als eine architektonische Entscheidung darüber, wie Verantwortung im System verankert wird – zwischen Regelung, Entscheidungslogik und menschlicher Aufsicht. Autonomie wird damit zur Voraussetzung für industrielle Integration, nicht zum Risiko.[2][7]
- Systemische Autonomie → Verhalten entsteht aus kontinuierlicher Zustandsbewertung
- Energie als Steuergröße → Missionsumfang und Rückkehr werden dynamisch angepasst
- Degradationslogik → kontrollierte Übergänge statt abruptem Kontrollverlust
Diese Form von Autonomie markiert keinen radikalen Bruch, sondern eine logische Weiterentwicklung. Flugroboter werden nicht zu selbstständigen Akteuren, sondern zu verlässlichen technischen Systemen, die innerhalb definierter Rahmenbedingungen eigenständig operieren. Autonomie wird damit zur Grundlage industrieller Einsatzfähigkeit. Sie macht Flug planbar, integrierbar und kontrollierbar.
Im nächsten Kapitel geht es darum, wie diese systemische Autonomie mit menschlicher Verantwortung verbunden bleibt – also wie Human in the Loop nicht als Notlösung, sondern als integraler Bestandteil kontrollierter Autonomie verstanden wird.
Human in the Loop, Kontrolle bleibt beim Menschen
Mit wachsender Autonomie verschiebt sich die Rolle des Menschen grundlegend. Direkte Steuerung wird zur Ausnahme, während Aufsicht, Freigabe und Verantwortungsübernahme in den Vordergrund rücken. Das ist kein Verlust an Kontrolle, sondern eine Voraussetzung für Skalierung. In industriellen Umgebungen ist entscheidend, dass Entscheidungen nachvollziehbar bleiben, dass Eingriffspunkte klar definiert sind und dass Verantwortung nicht in einer intransparenten Black Box verschwindet. Human in the Loop bedeutet, dass die Maschine Echtzeitregelung und physische Ausführung übernimmt, während der Mensch Rahmenbedingungen setzt, Systemzustände überwacht und bei Grenzfällen eingreift.[8][9]
Diese Trennung von operativer Ausführung und strategischer Kontrolle ist zentral für den industriellen Einsatz autonomer Systeme. Der Mensch agiert nicht mehr als permanenter Pilot, sondern als verantwortliche Instanz auf Systemebene. Er definiert Missionsparameter, Sicherheitsgrenzen, Prioritäten und Abbruchkriterien. Autonomie entfaltet ihren Nutzen erst dann vollständig, wenn menschliche Eingriffe nicht ständig notwendig sind, aber jederzeit möglich bleiben. Kontrolle wird dadurch nicht aufgegeben, sondern abstrahiert und formalisiert.[8][9]
Für Spatial Flight Control ist dieses Prinzip besonders relevant. Die Entkopplung von Orientierung und Translation erhöht die Bewegungsfreiheit und erweitert den Handlungsspielraum des Systems. Gleichzeitig entstehen neue sicherheitsrelevante Zustände, die nicht mehr allein durch klassische Fluglogik abgedeckt werden können. Operative Sicherheit entsteht deshalb nicht durch Einschränkung der Autonomie, sondern durch transparente Systemzustände, klar definierte Eskalationslogik und geregelte Übergänge zwischen autonomem Verhalten und menschlicher Entscheidungshoheit. Genau diese Struktur entscheidet in der Praxis darüber, ob ein System als Demonstrator wahrgenommen wird oder als industriell belastbare Lösung.[8][9]

Human in the Loop, autonome Ausführung mit klaren Kontrollpunkten und Eingriffsmöglichkeiten
Visualisierung: © Ulrich Buckenlei | Konzeptillustration | Redaktionelle Darstellung
Die Illustration macht sichtbar, wie Human in the Loop in der Praxis als kontinuierlicher Rückkopplungskreis funktioniert. Links steht die menschliche Instanz als Aufsichtspunkt, nicht als Joystick Pilot, sondern als Entscheidungsebene. Rechts agiert das System als ausführende Einheit, die Zustände erfasst, Risiken bewertet und Handlungen vorschlägt oder ausführt. Dazwischen liegen klar erkennbare Schleifen, die zeigen, dass Informationen permanent zurückfließen und nicht erst im Störfall sichtbar werden. Genau diese laufende Transparenz ist die Grundlage für Vertrauen im Betrieb.[8]
Wichtig ist dabei, dass Eingriffe an definierten Kontrollpunkten stattfinden. Statt willkürlich in die Regelung einzugreifen, arbeitet der Mensch mit Freigaben, Prioritätswechseln und klaren Stop Bedingungen. In der Grafik wird das durch die Entscheidungsknoten und die Sicherheitsmarker angedeutet, die zwischen Aufsicht und Ausführung sitzen. So entsteht ein System, das selbstständig handelt, aber jederzeit in einen sicheren Modus wechseln kann, wenn Schwellenwerte überschritten werden oder Kontextbedingungen kippen.[8][9]
Aus Sicht industrieller Entscheider ist Human in the Loop kein regulatorisches Anhängsel, sondern ein bewusstes Designprinzip. Es schafft Auditierbarkeit, reduziert operative Risiken und macht Autonomie organisatorisch anschlussfähig. Systeme, die ihre Zustände nicht verständlich zurückmelden oder deren Eingriffspunkte unklar sind, lassen sich kaum skalieren. Human in the Loop stellt sicher, dass Autonomie nicht als Kontrollverlust wahrgenommen wird, sondern als strukturierte Erweiterung menschlicher Handlungsmöglichkeiten.[8][9]
- Aufsicht statt Präsenz → Kontrolle aus sicherer Distanz und auf Systemebene
- Eskalationslogik → definierte Eingriffe bei Grenzfällen und Abweichungen
- Nachvollziehbarkeit → Systemzustände und Entscheidungen bleiben prüfbar
Diese Form der Mensch System Interaktion markiert keinen Gegensatz zwischen Automatisierung und Verantwortung, sondern ihre bewusste Verbindung. Autonome Flugroboter werden nicht zu unkontrollierten Akteuren, sondern zu kooperativen Systemen innerhalb klarer Zuständigkeiten. Human in the Loop macht Autonomie gesellschaftlich, regulatorisch und industriell tragfähig.
Im nächsten Kapitel verschiebt sich der Fokus auf Sicherheit als Architektur. Also weg von nachträglicher Absicherung einzelner Funktionen hin zu eingebauten Sicherheitsmechanismen, die Autonomie von Beginn an strukturell absichern.
Sicherheit als Systemarchitektur, nicht als nachträgliche Maßnahme
Räumliche Flugsteuerung verändert nicht nur die Bewegungslogik, sondern verschiebt auch die Anforderungen an Sicherheit grundlegend. Nicht, weil Spatial Flight Control inhärent riskanter wäre als klassische Fluglogik, sondern weil sie mehr Freiheitsgrade eröffnet und damit mehr mögliche Systemzustände erzeugt. Sicherheit kann in diesem Kontext nicht als zusätzliche Schutzfunktion oder als nachträgliche Notabschaltung verstanden werden. Sie muss von Beginn an als architektonisches Prinzip im System verankert sein. Permanente Zustandsbewertung, mehrschichtige Redundanz, transparente Entscheidungslogik und kontrollierte Degradationspfade bilden gemeinsam die Grundlage für Vertrauen in autonome räumliche Systeme.[8][9]
Die zentrale Idee ist dabei eine Verschiebung von reaktiver zu präventiver Sicherheit. Statt erst auf Fehlverhalten zu reagieren, bewertet das System kontinuierlich, ob sich der aktuelle Flugzustand innerhalb eines zulässigen und stabilen Zustandsraums befindet. Sensorische Eingaben aus unterschiedlichen Quellen werden zusammengeführt, plausibilisiert und in einen konsistenten Zustandskern überführt. Sicherheit entsteht nicht durch Stillstand oder starre Begrenzung, sondern durch die Fähigkeit, Bewegung kontrolliert zuzulassen, ihre Qualität zu bewerten und sie bei Bedarf gezielt einzuschränken.[8][9]
Ein wesentlicher Unterschied zu klassischen Flugplattformen liegt darin, dass Stabilität nicht mehr an einer bestimmten Lage oder Orientierung festgemacht wird. Da Orientierung und Translation entkoppelt sind, muss Sicherheit auf einer höheren Abstraktionsebene greifen. Das System bewertet nicht nur Position und Geschwindigkeit, sondern auch Unsicherheiten, Reserven, Redundanzzustände und externe Einflüsse. Dadurch wird Sicherheit zu einer kontinuierlichen Eigenschaft des Systems und nicht zu einem binären Zustand zwischen „normal“ und „Notfall“.[8][9]
Im industriellen Betrieb rücken dabei zwei Kriterien besonders in den Fokus: Vorhersehbarkeit und Nachweisbarkeit. Ein System muss jederzeit erklären können, warum es eine bestimmte Entscheidung getroffen hat, welche Alternativen verworfen wurden und wie sich diese Entscheidung auf den weiteren Systemzustand auswirkt. Dazu gehören nicht nur aerodynamische oder regelungstechnische Aspekte, sondern ebenso Cybersecurity, Kommunikationsausfälle, Sensorfehler, Energieengpässe und mechanische Abweichungen. Die relevante Frage lautet daher nicht, ob ein System spektakulär fliegen kann, sondern ob es sich unter realistischen Störungen kontrolliert, stabil und regelkonform verhält.[8][10]
Gerade Spatial Flight Control verlangt nach einer Sicherheitsarchitektur, die Zustände nicht binär bewertet, sondern graduell. Anstelle von „sicher“ oder „unsicher“ treten abgestufte Betriebsmodi. Das System kann Leistung reduzieren, Freiheitsgrade einschränken, Redundanzen aktivieren, Abstände vergrößern oder in definierte Safe States übergehen. Degradation wird damit zu einem gestalteten, nachvollziehbaren Prozess und nicht zu einem abrupten Kontrollverlust. Diese Fähigkeit ist entscheidend für industrielle Akzeptanz, da sie Ausfälle planbar, analysierbar und beherrschbar macht.[8][10]
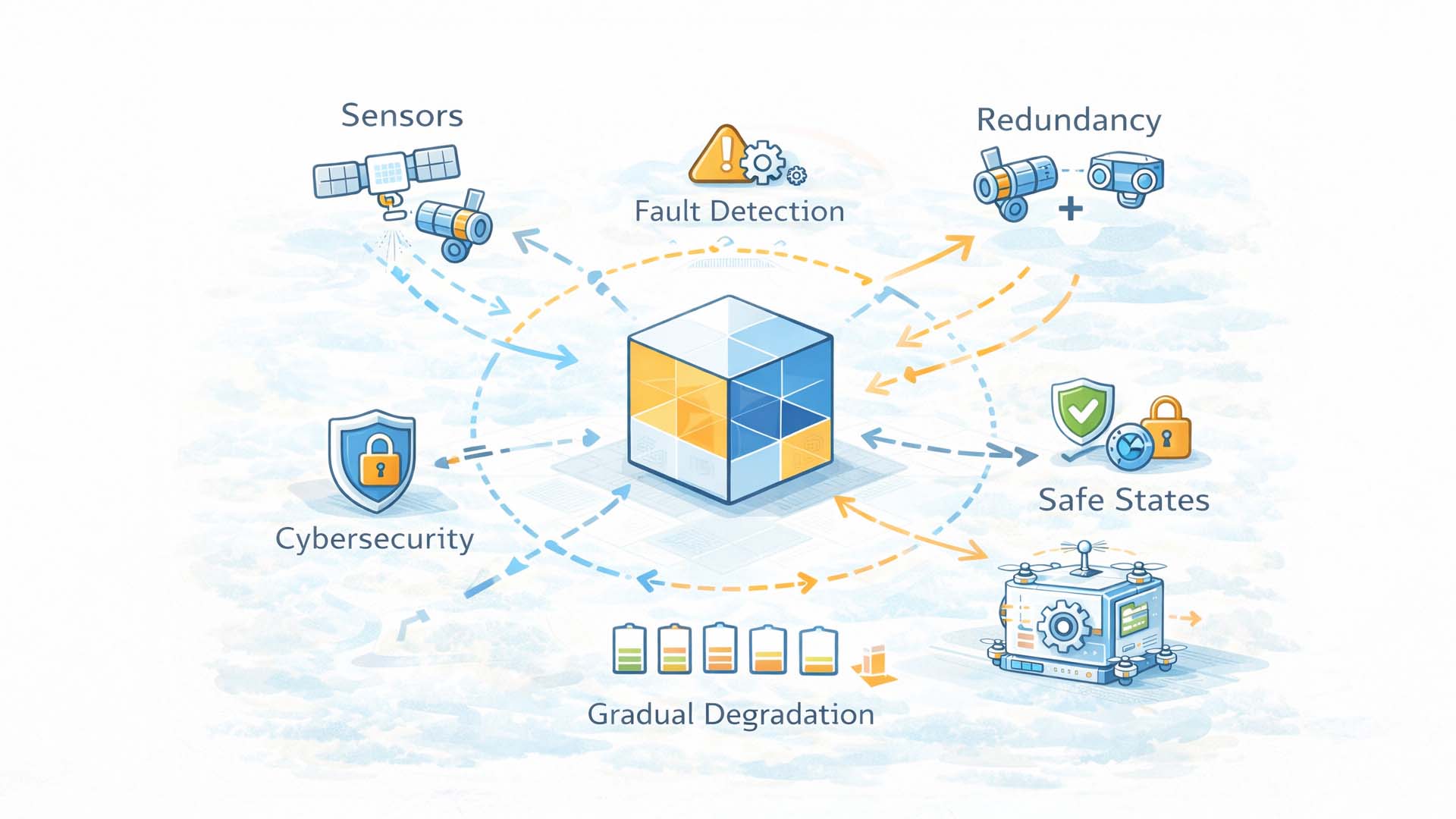
Sicherheitsarchitektur, Zustandsanalyse, Redundanz und Degradationslogik als integrales Designprinzip
Illustration: konzeptionelle Darstellung | Redaktionelle Visualisierung
Die Illustration macht diese Logik visuell greifbar. Im Zentrum steht ein konsolidierter Zustandsraum, der alle relevanten Systeminformationen bündelt. Um ihn herum sind Sensorik, Redundanzmechanismen, Fehlererkennung, sichere Betriebszustände und graduelle Degradationspfade angeordnet. Pfeile und Rückkopplungsschleifen verdeutlichen, dass Sicherheit kein linearer Ablauf ist, sondern ein permanenter Regelkreis. Einzelne Ausfälle führen nicht sofort zu Kontrollverlust, sondern werden durch alternative Datenquellen, reduzierte Freiheitsgrade oder konservativere Entscheidungslogik abgefangen.[8][9]
Für Entscheider bedeutet das einen klaren Perspektivwechsel. Die Bewertung von Flugrobotik verschiebt sich weg von isolierten Hardwaremerkmalen wie Nutzlast, Reichweite oder Motorleistung hin zu architektonischen Fragen. Relevant wird, wie Risiken systemisch adressiert werden, wie transparent Zustände kommuniziert werden und wie gut sich das System in bestehende Sicherheits-, Compliance- und Zertifizierungsstrukturen integrieren lässt. Spatial Flight Control wird dadurch zu einer eigenständigen Technologiekategorie – nicht wegen eines einzelnen Bauteils, sondern wegen der Art, wie Sicherheit als integraler Bestandteil des Gesamtsystems gedacht wird.[1][5]
- Designbasierte Sicherheit → Risiken werden kontinuierlich und systemisch bewertet
- Transparenz → Zustände, Entscheidungen und Übergänge bleiben nachvollziehbar
- Regulatorische Anschlussfähigkeit → Architektur orientiert sich an etablierten Sicherheits- und Normrahmen
Sicherheit wird damit nicht zum limitierenden Faktor von Autonomie, sondern zu ihrer Voraussetzung. Nur Systeme, die ihre Risiken strukturell beherrschen, lassen sich skalieren, zertifizieren und zuverlässig in industrielle Prozesse integrieren. Spatial Flight Control zeigt, dass erweiterte Bewegungsfreiheit und hohe Sicherheitsanforderungen kein Widerspruch sind, sondern sich gegenseitig bedingen – wenn sie von Anfang an architektonisch sauber umgesetzt werden.
Der nächste Abschnitt zeigt das Thema in bewegten Bildern und ordnet ein, warum kontrollierte Raumlogik für industrielle Anwendungen relevanter ist als reine Flugakrobatik.
Video, räumliche Fluglogik unter realen Bedingungen
Das folgende Video zeigt Flugverhalten, das mit klassischer Neigungslogik so nicht plausibel wäre. Der Fokus liegt auf der entkoppelten Raumkontrolle, also darauf, dass das System seine Bahn stabil halten kann, während es gleichzeitig seine Orientierung dynamisch verändert. Genau diese Fähigkeit ist der Kern von Spatial Flight Control, nicht als Trick, sondern als Hinweis auf eine neue Kategorie von Regelung und Systemdesign.
Die Sequenzen machen sichtbar, was im Text abstrakt bleibt. Eine stabile Raumposition trotz Rotation entsteht nur, wenn das System seinen vollständigen dreidimensionalen Zustand fortlaufend schätzt und Kräfte sowie Drehmomente in Echtzeit ausgleicht. Für Entscheider ist das wichtig, weil die eigentliche Innovation nicht in der Hardwareästhetik liegt, sondern in der Kontrolllogik, die neue Prozessformen überhaupt erst ermöglicht.[1][5]
Videostandbild als redaktionelle Einordnung, Rechte verbleiben bei den jeweiligen Rechteinhabern
Videomaterial aus öffentlich zugänglichen Quellen | Redaktionelle Analyse und Kontext: Ulrich Buckenlei
Hinweis: Das Video ist zu journalistischen und analytischen Zwecken eingebettet und für mobile Wiedergabe einschließlich iOS optimiert.
Quellen und Referenzen
- IEEE Robotics and Automation Letters, Forschung zu fully actuated Multirotor Systemen, Tilt Rotor Konzepten und Regelungsverfahren für entkoppelte Translation und Orientierung. [1]
- Science Robotics, Übersichtsarbeiten zu Grenzen klassischer Multikopterlogik in komplexen Umgebungen und zu neuen Kontrollparadigmen in der Luftrobotik. [2]
- ICRA Proceedings, Beiträge zu state estimation, sensor fusion und Echtzeitregelung für aggressive und präzise Flugmanöver unter realen Störungen. [3]
- IEEE Robotics and Automation Magazine, industrielle Anwendungen von aerial robotics in confined spaces, inklusive Sicherheitsaspekten und Prozessintegration. [4]
- ETH Zürich, Robotik Forschung, Veröffentlichungen zu Echtzeit Zustandsschätzung, Regelung und aerial manipulation als Grundlage räumlicher Kontrolle. [5]
- PX4 Autopilot Dokumentation, Systemarchitektur, state estimation Pipeline, Regelkreise, Sicherheitsmodi und Fail safe Logik als praxisnahe Referenz für industrielle Entwicklung. [6]
- EASA, Grundlagen zu Human in the Loop und Betriebsmodellen für UAS Operationen im zivilen Kontext. [7]
- EASA, Specific Operations Risk Assessment SORA, Methodik zur Risikoklassifizierung und Minderungslogik für Drohnenoperationen. [8]
- ISO, Normenfamilie zu Anforderungen für sichere UAS Operationen und sicherheitskritische Betriebsverfahren. [9]
- ENISA und nationale Leitfäden, Empfehlungen zu Cybersecurity Risiken und Schutzmaßnahmen im Kontext unbemannter Systeme und kritischer Infrastruktur. [10]
Wenn räumliche Autonomie zur Entscheidungsfrage wird
Spatial Flight Control markiert keinen kurzfristigen Trend, sondern einen strukturellen Entwicklungsschritt. Entscheidend ist nicht die einzelne Drohne, sondern das Kontrollparadigma. Bewegung wird nicht länger aus Stabilität abgeleitet, sondern aus kontinuierlicher räumlicher Regelung. Für technikinteressierte Entscheider verschiebt sich damit die Bewertungsgrundlage, weniger Fokus auf einzelne Hardwaremerkmale, mehr Fokus auf Systemarchitektur, Prozessintegration und Risikobeherrschung.
Ob Inspektion, Annäherung, Betrieb in engen Räumen oder Vorbereitung von Interaktion, räumliche Autonomie eröffnet neue Handlungsspielräume, stellt aber zugleich höhere Anforderungen an Systemverständnis, Sicherheitsdesign und Integration. Die zentrale Frage lautet daher nicht, ob diese Technologie relevant ist, sondern wo sie sinnvoll einsetzbar ist, und welche Nachweise im Betrieb erforderlich sind.

Das Visoric Expertenteam: Ulrich Buckenlei und Nataliya Daniltseva im Austausch über autonome Systeme, industrielle KI und die Übersetzung komplexer Technologien in verständliche Modelle
Quelle: VISORIC GmbH | München
Genau an dieser Schnittstelle arbeitet das Visoric Expertenteam in München. Im Fokus steht die analytische Einordnung komplexer Technologien, die Übersetzung technischer Systeme in verständliche Modelle und die Unterstützung fundierter Entscheidungen, unabhängig von Herstellern, Produkten oder kurzfristigem Hype.
- Einordnung von Spatial Flight Control, Reifegrad, Chancen, Grenzen
- Bewertung von Sicherheitsarchitektur, Betriebslogik und Risiko
- Übersetzung komplexer Regelungssysteme für Entscheider und Stakeholder
- Konzeption von Visualisierungen, Simulationen und erklärenden Formaten
Wenn Sie bewerten möchten, welche Rolle räumliche Autonomie und neue Flugsteuerungsansätze in Ihrem industriellen Kontext spielen können, bietet ein Gespräch mit dem Visoric Expertenteam eine fundierte, unabhängige und praxisnahe Perspektive.
Kontaktpersonen: Nataliya Daniltseva (Projektleiterin) Adresse:
Ulrich Buckenlei (Kreativdirektor)
Mobil: +49 152 53532871
E-Mail: ulrich.buckenlei@visoric.com
Mobil: + 49 176 72805705
E-Mail: nataliya.daniltseva@visoric.com
VISORIC GmbH
Bayerstraße 13
D-80335 München